新闻与事件



- 学院介绍
- 新闻事件
- 人才培养
- 研究平台
- 师资队伍
- 人物风采
- 设计实践
- 合作交流
- 党群工作
- 校友工作
- 服务指南
设计学院2026年研究生“优才夏令营”成果展示
近日,设计学院2026年研究生“优才夏令营”在设计大楼举行。建筑学系、设计系、风景园林系分别围绕城市遗产活化、航天设计、未来景观等主题,通过破冰活动、学术讲座、城市调研、设计工作坊、成果汇报等学术交流和实践体验,为来自全国高校的百余名优秀学子搭建体验设计学院“大设计”办学特色、展现自我的双向交流平台。

参营花絮
实践探索
城市调研与案例参观
虚实融合的武康大楼Citywalk /
本届建筑学国际专硕夏令营以“数智时代的城市遗产活化”为主题。营员们在武康大楼所在的衡复风貌区开展实地调研,沉浸式感受海派文化,进一步激发了对城市遗产活化的设计思考。营员们参观学习了由上海交大设计学院师生联合策划开发的《120年·120帧:银幕光影重塑衡复记忆》AI展与《上海1924:武康百年VR奇幻之旅》VR展。建筑学系副教授黄华青现场作学术讲解,启发大家对数智时代的前沿技术、遗产保护、城市更新、文商旅融合的思考。
公共生活空间的绿色焕新 /
“未来景观”菁英营营员们实地考察了由风景园林系副教授,Lab D+H主创设计师李中伟主持设计的日晖绿地、茶陵绿地与“黑石M+”城市微更新项目等。李中伟以生动幽默的讲解方式,深入浅出地剖析了项目背后的设计思考、实施策略与社会价值,通过真实案例的现场解读,帮助营员们更直观地理解设计理念与实际场地之间的有机联系,深化了对景观实践的理解与感知。
知识输入
专业知识与前沿技术
实战赋能创新 /
创新设计精英夏令营得到了中国航天科技集团公司第八研究院的大力支持(以下简称航天八院)。来自航天八院的王卫军、童玉奇、刘君巍、寿星、李桃等共创导师亲临指导,围绕“月面机器人创新设计”主题,为营员们提供系统化、全过程的专业指导,共同探索解决问题的新方法。
专业启迪未来 /
建筑学系黄华青、杜骞、孙昊德三位老师与建筑学国际专硕夏令营各小组展开深入交流,从产品定位、技术难点、交互体验、学术规范与遗产保护等角度提供学术支持和经验指导。
“未来景观”菁英营聚焦风景园林的多元发展路径,邀请风景园林系资深教授王云、车生泉和张荻开展专项讲座,分别围绕“可持续生态设计”“城乡游憩空间体系的创新实践”“观赏植物种质资源创新与应用科研”深入讲解各自领域的前沿动态与研究实践,帮助营员拓展专业认知视野,促进多学科视角下的思维碰撞与跨界交流。
工作坊成果展示
数智时代的城市遗产活化
工作坊聚焦数智时代的城市遗产活化。在遗产保护、城市更新、文商旅融合的背景下,围绕武康大楼所在区域的衡复风貌区城市遗产,探索如何基于数智时代前沿技术(如人工智能/AI、虚拟现实/VR、元宇宙/Metaverse等)对于设计工具、设计路径和应用场景的革新,为该区域的城市遗产活化构想有前瞻性、人文性和公众性的设计方案。
01. ARchive Windows —— 窗里窗外,数智共生
涂 灿 华中科技大学
王誉霖 西安建筑科技大学
吴芷婧 中国美术学院

设计方案|
“ARchive Windows窗里窗外·数智共生”计划通过数字技术重构衡复风貌区的人居互动模式。游客在街区入口领取的手册将成为开启体验的钥匙,配合租赁的AR眼镜设备,当视线聚焦于居民授权的特定窗户时,历史影像将在现实建筑上精准叠加——可能是1940年代文人临窗写作的全息投影,或是1980年代市井生活的动态重现。
这些由居民提供的珍贵记忆数据既满足了游客对历史空间的好奇,又严格规避了当代生活的隐私区域。我们基于真实世界的路上观察学,在围墙与门廊嵌入可识别的视觉密码,游客通过手册指引收集散落的“时空碎片”,丰富观察体验。这种以“数智窗景”为媒介的解决方案,既保留了建筑立面的物理完整性,又通过居民自主掌控的历史影像授权机制,在虚拟维度创造了可调节的“隐私-展示”缓冲带,最终实现物理空间的隐私保护与数字空间的文化共享并行不悖的遗产保护生态,让每扇窗户成为连接过去与现在、居民与游客的“时空转译器”。

注:视频内部分场景由AI生成
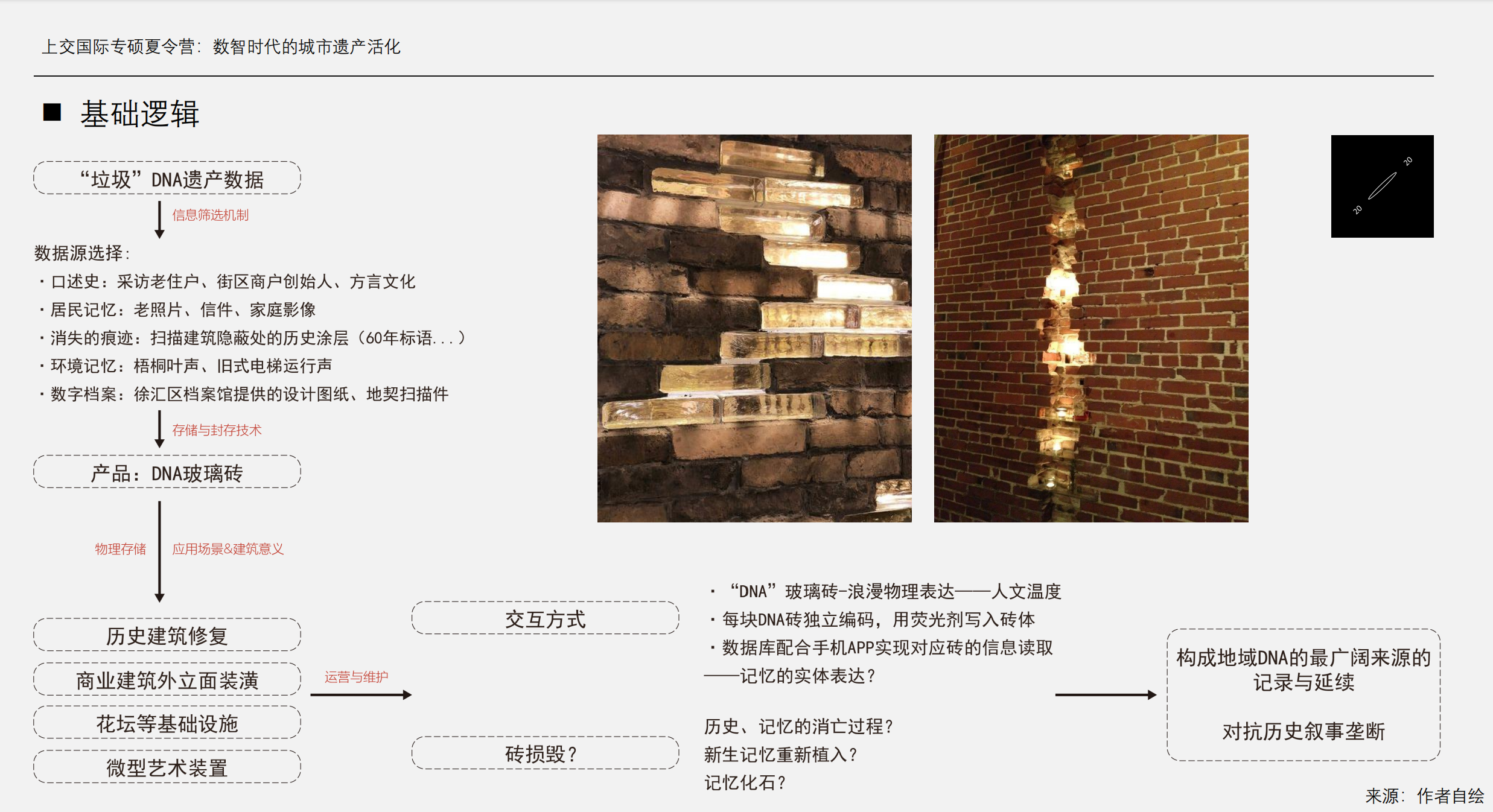
02. 琉璃纪事 ——上海衡复风貌区DNA玻璃砖数据存储城市遗产
宋思涵 重庆大学
林子潇 天津大学
白梓昀 北京建筑大学
设计方案|
城市的DNA由什么组成?名人纪念馆、保护故居、依托轶事的故事复原体验?为什么历史叙事的主权总是在名人手里,居住在这里的居民,那些平凡的普通人的生活痕迹是否值得被铭记?
从街头巷尾的叫卖、梧桐树的光影、旧式电梯的咯吱咯吱到零散朴素的口述史,我们从普通人的记忆出发,探索城市遗产活化进程中更加全面、真实、朴素的呈现。
设计利用人工合成dna存储技术,将冗杂的居民记忆存储并封存在特制玻璃砖中,从而形成新的旧建筑更新或修复材料。为每块砖编码,同时关联记忆数据库,让路过的行人可以通过手机APP等交互手段快速解码面前这块玻璃砖存储的记忆,从而参与到更真实的体验中。让记忆作为建筑材料永久性地参与到城市更新的进程中。

注:视频内部分场景由AI生成
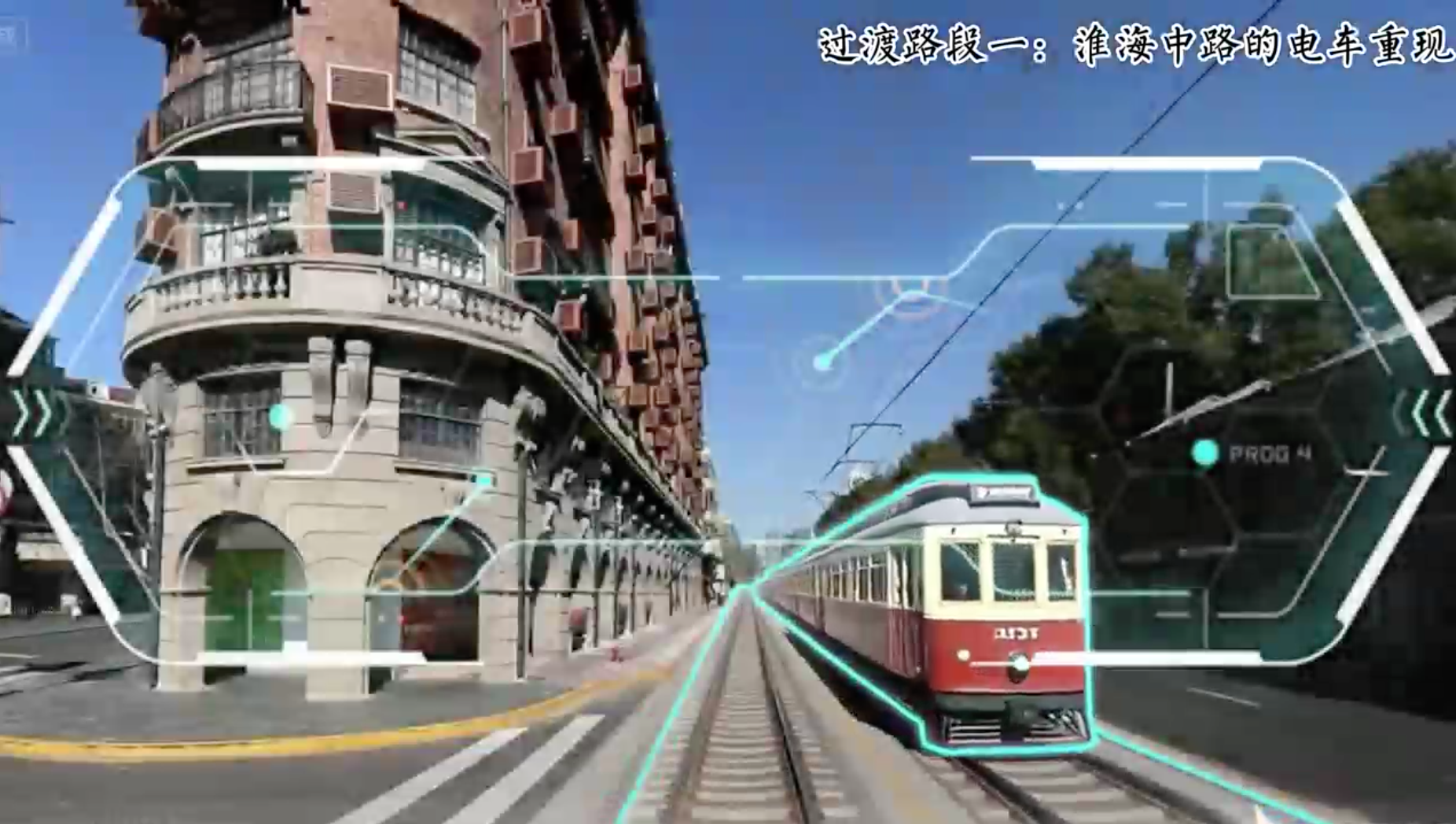
03. 文化街景沉浸之旅
谢雨潇 上海交通大学
宗斯勤 重庆大学
张晨曦 武汉大学
设计方案|
我们关注的不仅是“城市文化”的表层符号,更是在城市肌理中真实存在的建筑遗产——比如武康大楼和衡复风貌区那一幢幢斑驳却充满温度的老房子。它们承载着时代的记忆,而这些记忆却在快速发展的城市更新中逐渐淡出人们的视野。我们希望借助AI、AR等数智技术,为这些沉默的历史注入新的生命力,让它们重新走入当代人的日常。项目构建了一种连续而沉浸的互动式街景体验,观者如同踏入一场剧情游戏,自主定制文化漫步路线,去聆听、去触摸、去发现过去与现在的细微连接。这不仅是一段城市漫游,更是一场与城市遗产建筑的深情对话。我们始终相信,建筑的意义不仅在于被保护,更在于被重新理解和重新生活,成为每个人日常中可感、可亲、可参与的一部分。
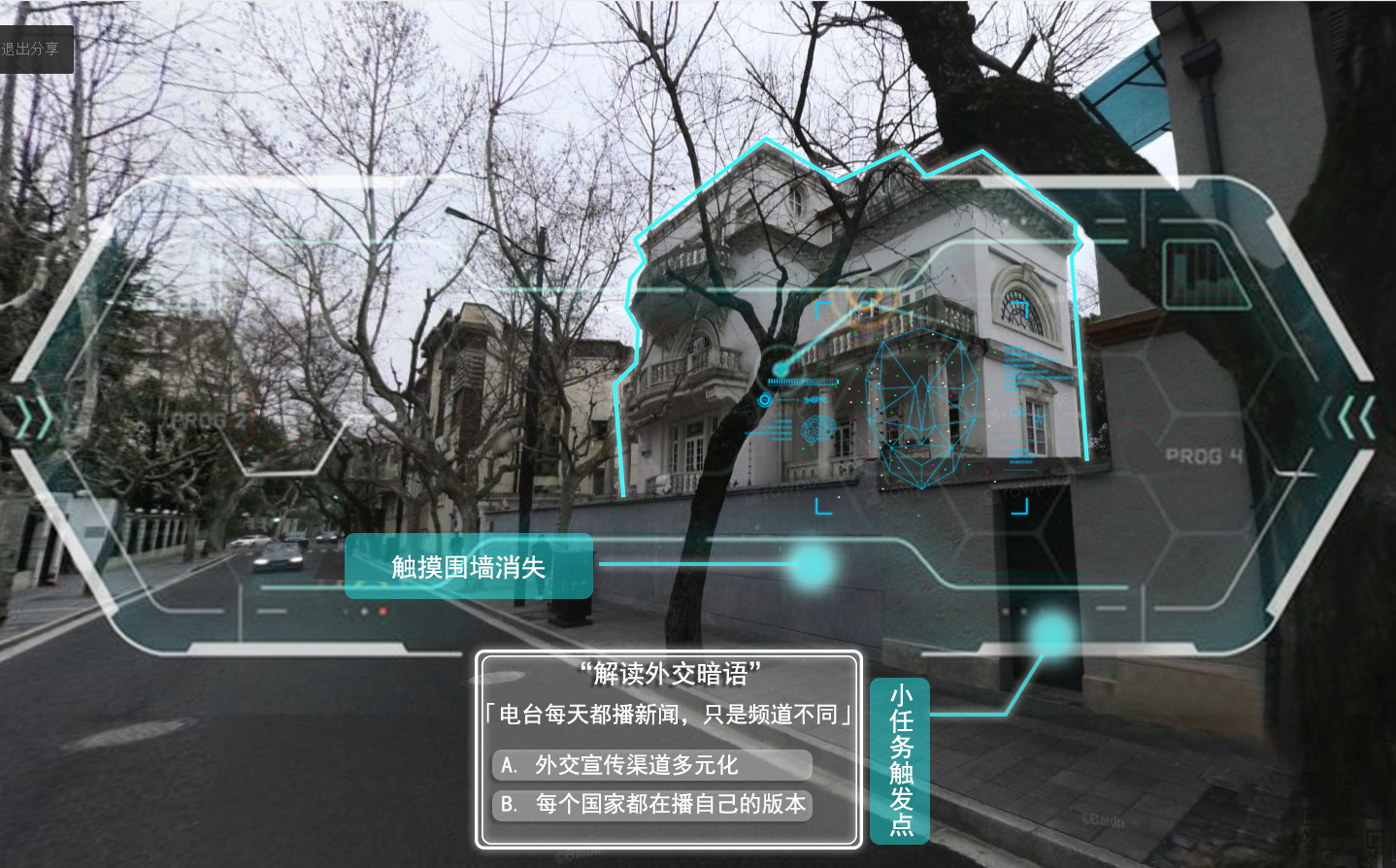
04. 衡复历史重现——MR沉浸之旅
郭简豪 上海大学
黄瑞颖 中央美术学院
王文羽 天津大学

设计方案|
上海徐汇衡复风貌区蕴藏着丰富而厚重的历史文化资源,承载了众多历史人物与事件的记忆。项目组基于上海政府大力倡导公众参观文化名人故居的相关政策与数智技术优势,让“当时人讲当时事”,旨在打造一场沉浸式的城市历史重现之旅。用户可通过手机小程序,在系统内看到街区的历史原貌和当时人的生活场景,获取历史建筑的三维模型等信息,并与数字NPC互动解决导航、文娱科普等基础问题。
我们还以衡复历史风貌区中曾经发生过的历史事件为原型,在特定历史建筑附近设置剧情体验副本。用户可以租借MR眼镜在数字历史人物的带领下沉浸式体验历史事件,一起完成特定任务将获得成就勋章、专属虚拟形象及DIY3D打印纪念品,以此激发大众探索热情,吸引更多人深入触摸衡复历史街区流淌的文化底蕴。
未来我们将努力探究数智技术赋能城市遗产活化与保护,在叙事、商业、居民参与和安全规划等方面持续完善,为风貌区中的文物保护、文旅宣传和居民生活提供新思路与新路径。
05. 城市遗产“记忆银行”
温佳坤 湖南大学
白直帆 上海交通大学

设计方案|
该平台基于UGC数据与AI算法构建,通过增强现实(AR)和虚拟现实(VR)技术,打造出一个融合记忆、互动与文化传播的APP系统。项目聚焦衡复风貌区活化受限的问题,打破传统“打卡式”旅游的浅层体验模式,鼓励本地居民与外来游客共同上传图像、视频与文字资料,构建可自我迭代的“记忆银行”。平台通过AI清洗与复原,实现“历史—现在—未来”的城市遗产再现,并同步开发沉浸式游览、文创商品与数据盈利机制。这不仅是对城市文化的一次科技重构,更是一场多主体共建共治的遗产活化实验。

注:视频内部分场景由AI生成
06. 头号筑梦师
景黄奕 武汉大学
王 硕 上海交通大学
柏雨馨 华中科技大学
设计方案|
本方案聚焦衡复风貌区城市遗产活化,针对武康大楼区域空间过载、人群关系失衡等问题,以“虚实共生·共享记忆”为核心,通过数智技术重构遗产体验。依托AR眼镜、AI生成、可编辑城市建构平台等技术,打造“筑梦师”、“体验者”交互叙事,同步搭建轻量化共创平台,支持用户自定义空间叙事(如预制家具配件生成专属故事场景),形成“千人千面”的武康街区多重宇宙。配套动态分流机制(集邮点位引导游客至周边“失意空间”)、居民碎片叙事模块(激活在地记忆),并通过MR气味触发、时空裂隙装置等技术增强沉浸感。方案既保留遗产原真性,又以共享机制平衡游客体验与居民生活,让历史在虚实对话中“活”起来,实现城市记忆的可持续传承。

月面机器人创新设计
工作坊以“月面机器人创新设计”为主题,聚焦未来载人月球探测中的关键任务与技术挑战
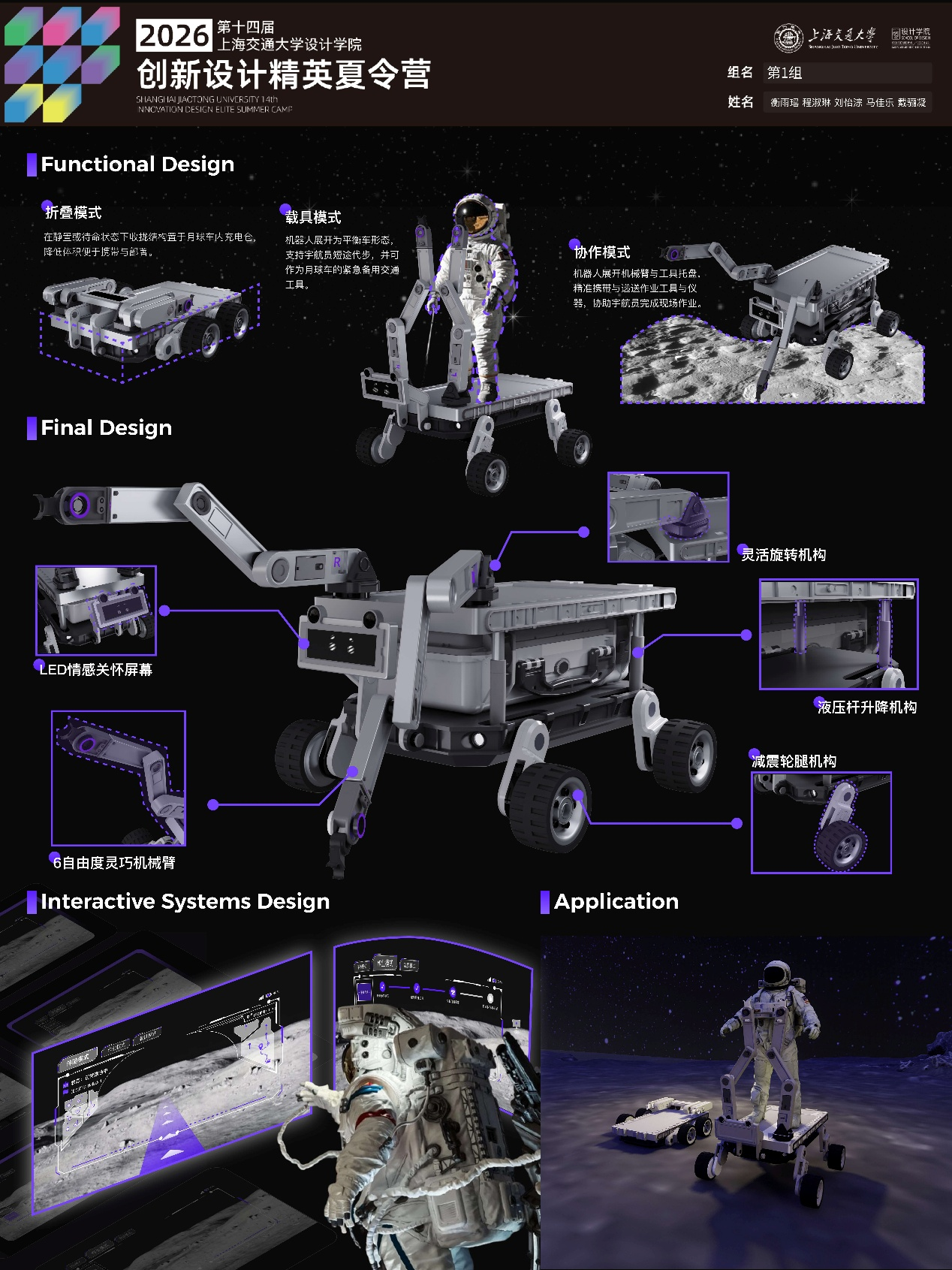
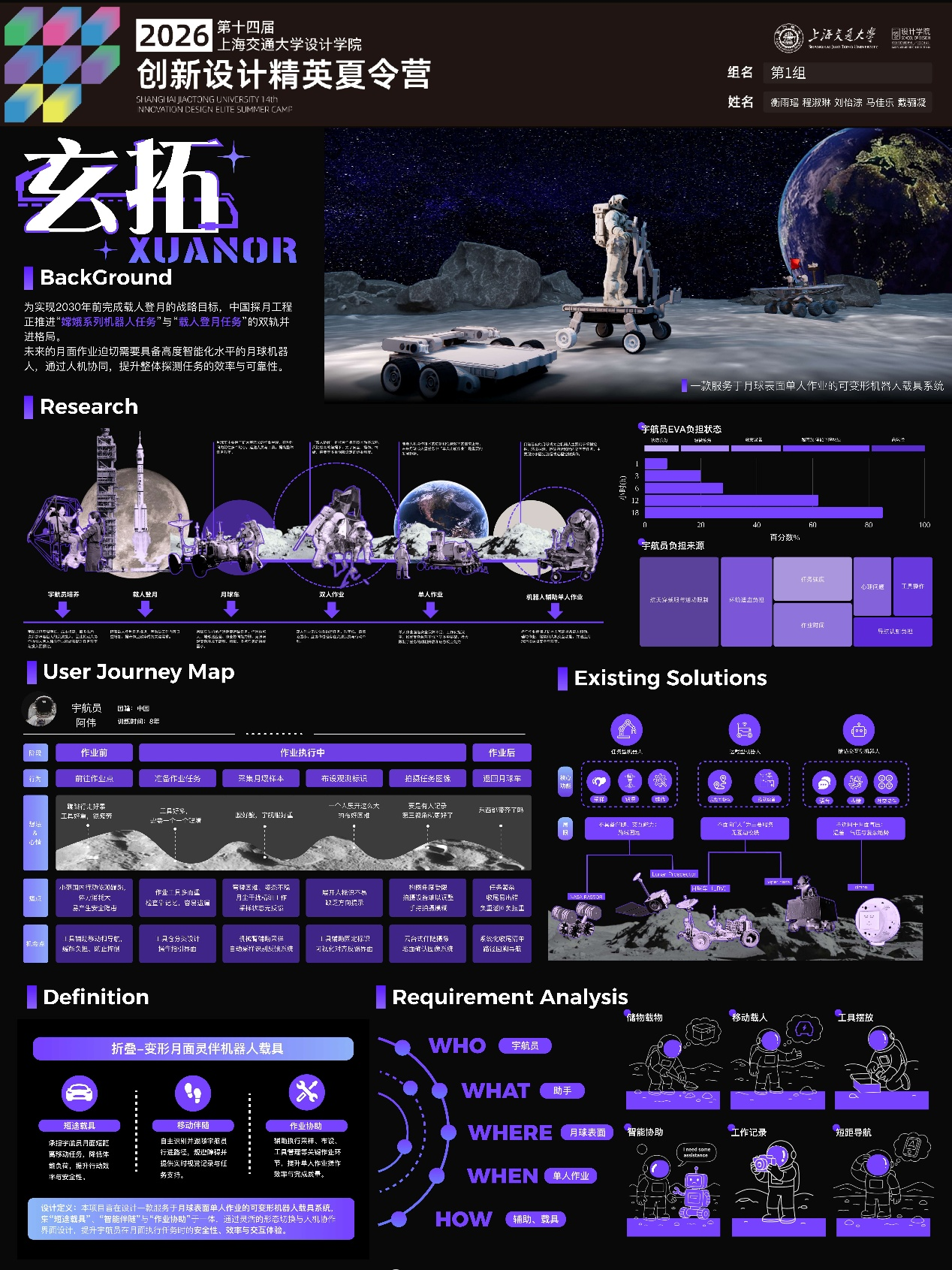
01. 玄拓 —— 一款服务于月球表面单人作业的可变形机器人载具系统
衡雨瑶 程淑琳 刘怡淙 马佳乐 戴骊凝
设计方案|本项目旨在设计一款服务于月球表面单人作业的可变形机器人载具系统,集“短途载具”“智能伴随”与“作业 协助”于一体,通过灵活的形态切换与人机协作界面设计,提升宇航员在月面执行任务时的安全性、效率与交互体验。
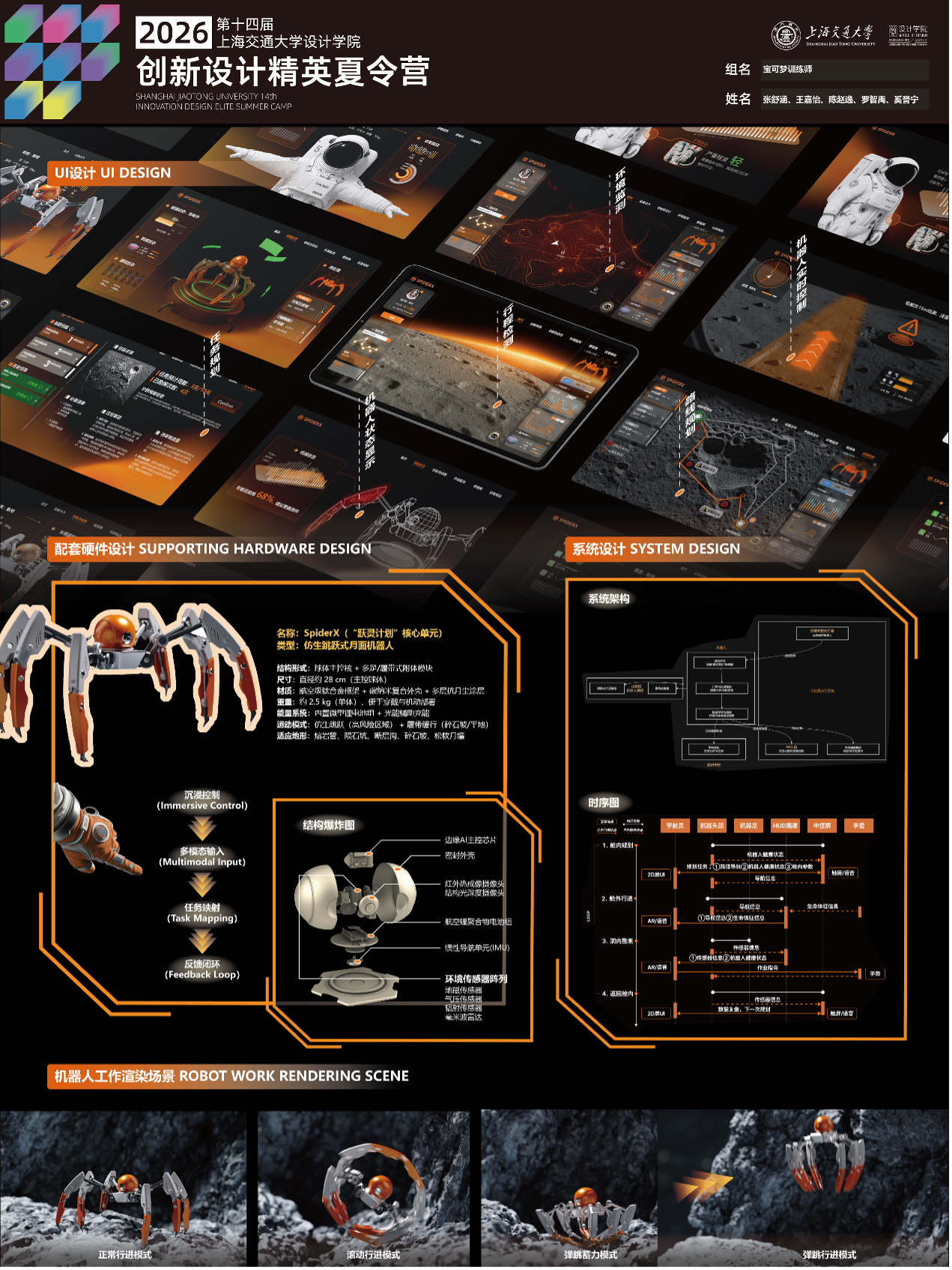
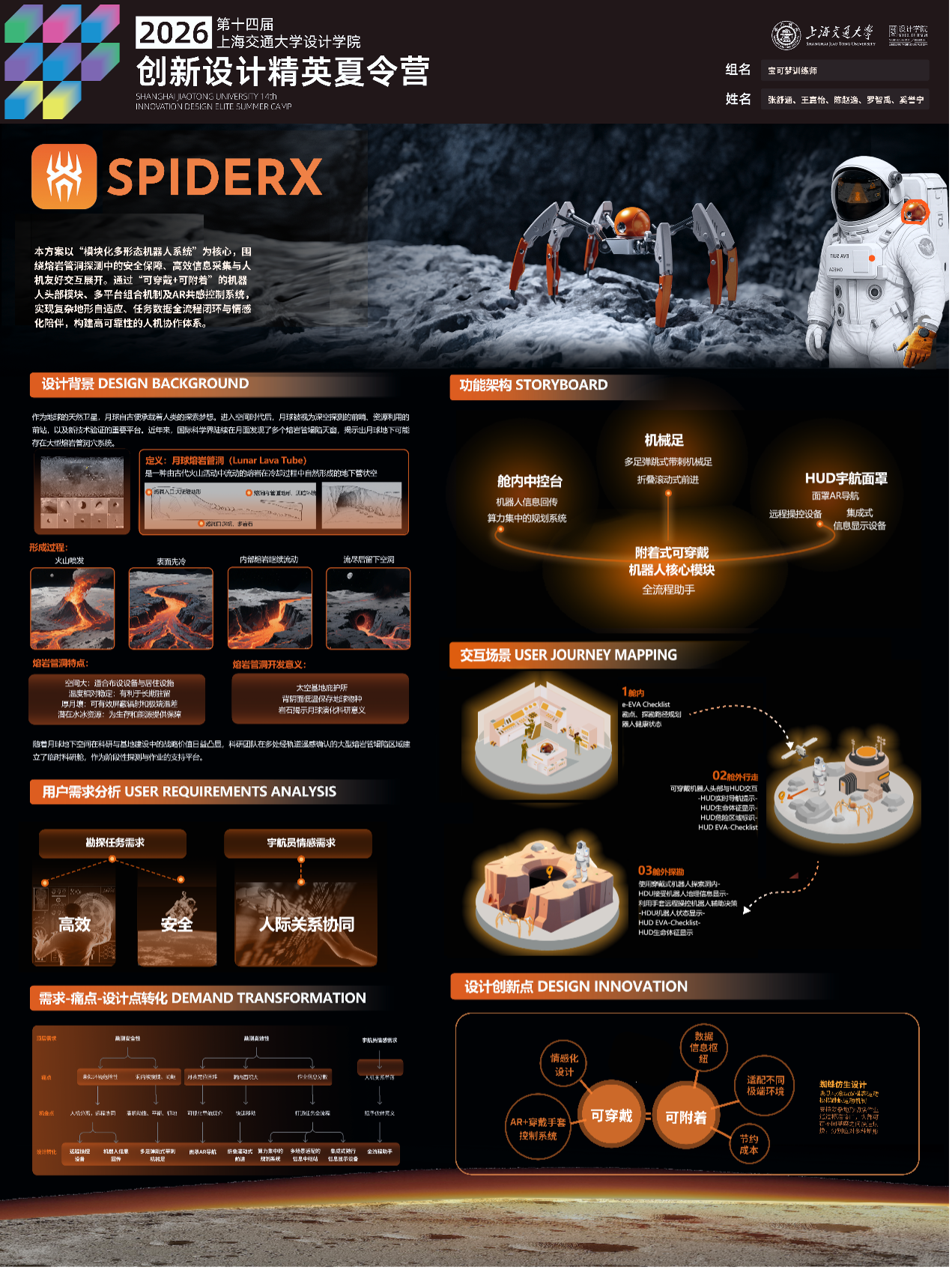
02. 可穿戴多形态机器人系统
张舒涵 奚誉宁 陈赵逸 王嘉怡 罗智禹
设计方案|以“模块化多形态机器人系统”为核心,围绕熔岩管洞探测中的安全保障、高效信息采集与人机友好交互展开。通过“可穿戴+可附着”的机器人头部模块、多平台组合机制及AR共感控制系统,实现复杂地形自适应、任务数据全流程闭环与情感化陪伴,构建高可靠性的人机协作体系。
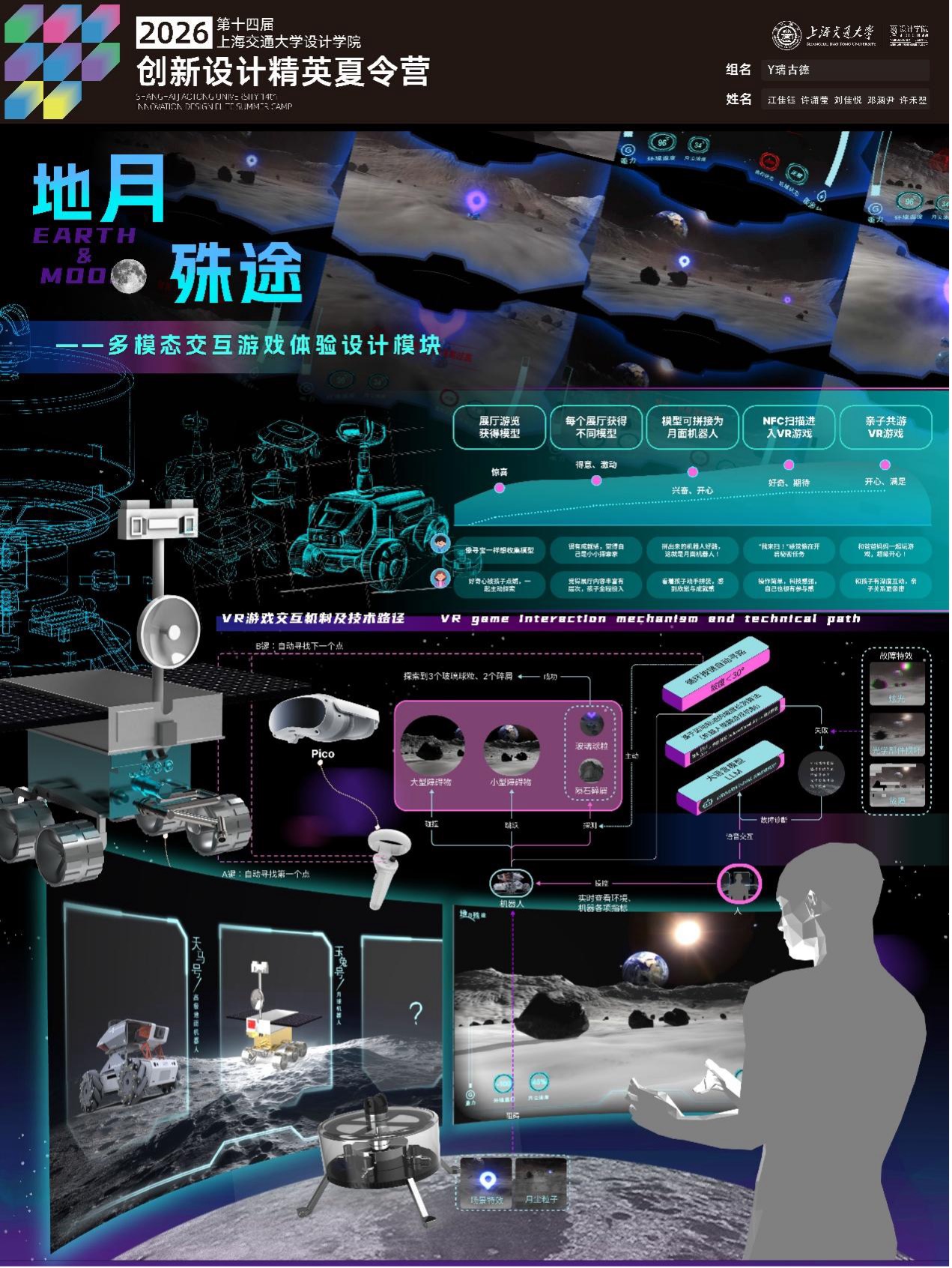
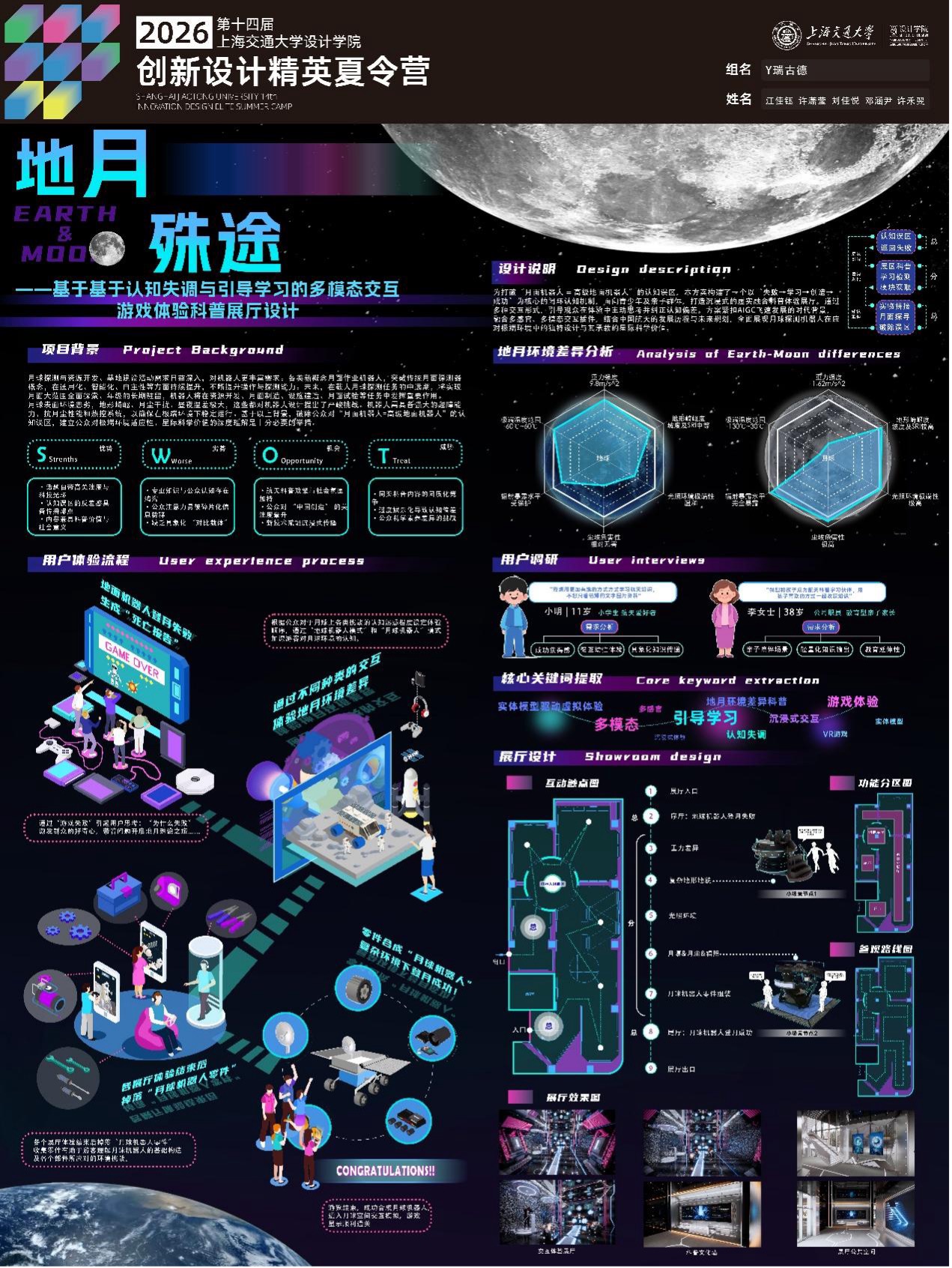
03. 地月殊途 —— 基于认知失调与引导学习的多模态交互游戏体验科普展厅设计
许禾翌 刘佳悦 邓涵尹 许潇莹 江佳钰
设计方案|构建以“失败→学习→创造→成功”为核心的闭环认知机制,面向青少年及亲子群体,打造沉浸式虚实融合科普体验展厅。通过多种交互形式,引导游客在体验中主动思考并纠正认知偏差。融合多感官、多模态交互插件,全面展现月球探测机器人在应对极端环境中的独特设计与其承载的星际科学价值。
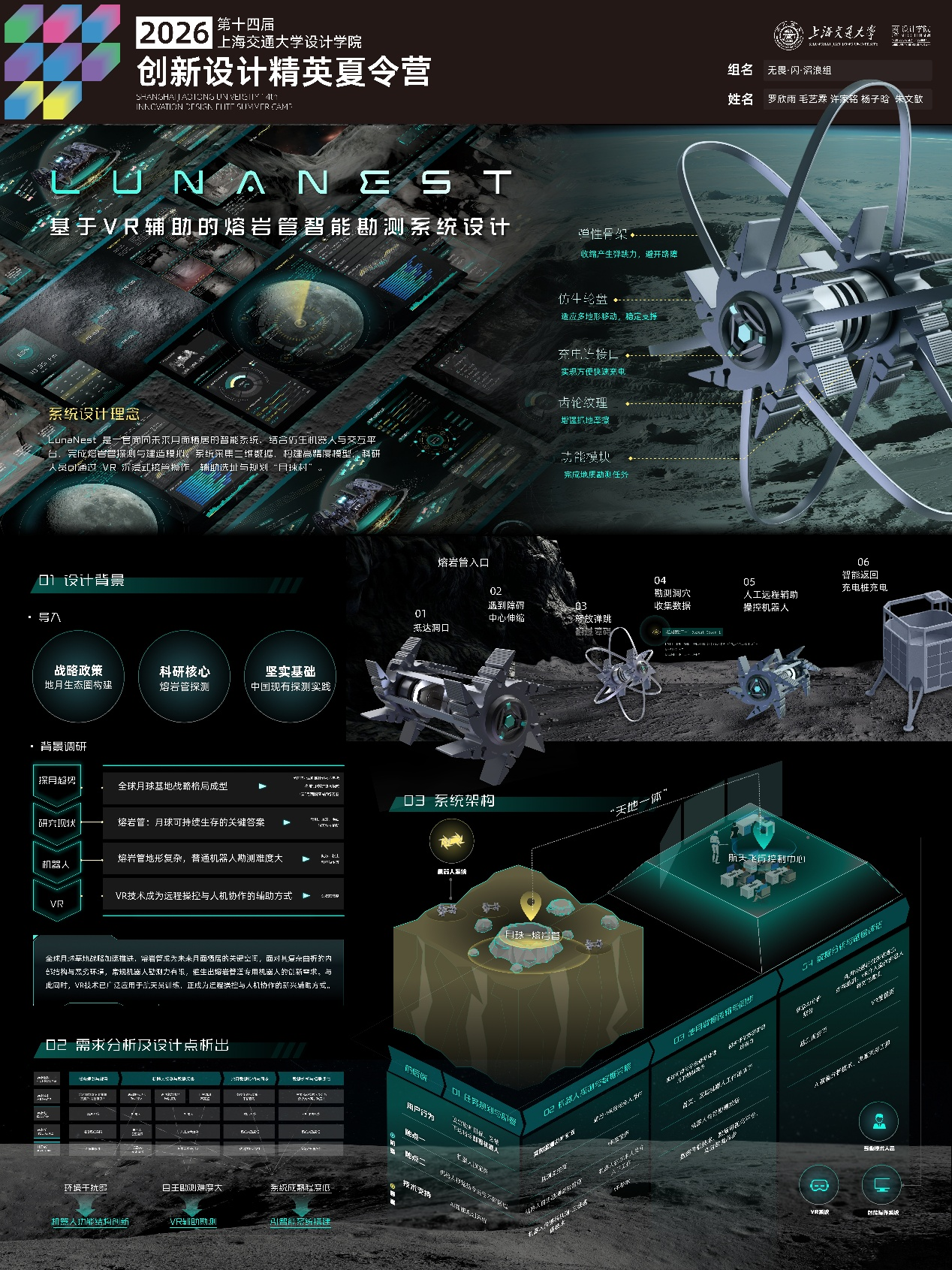
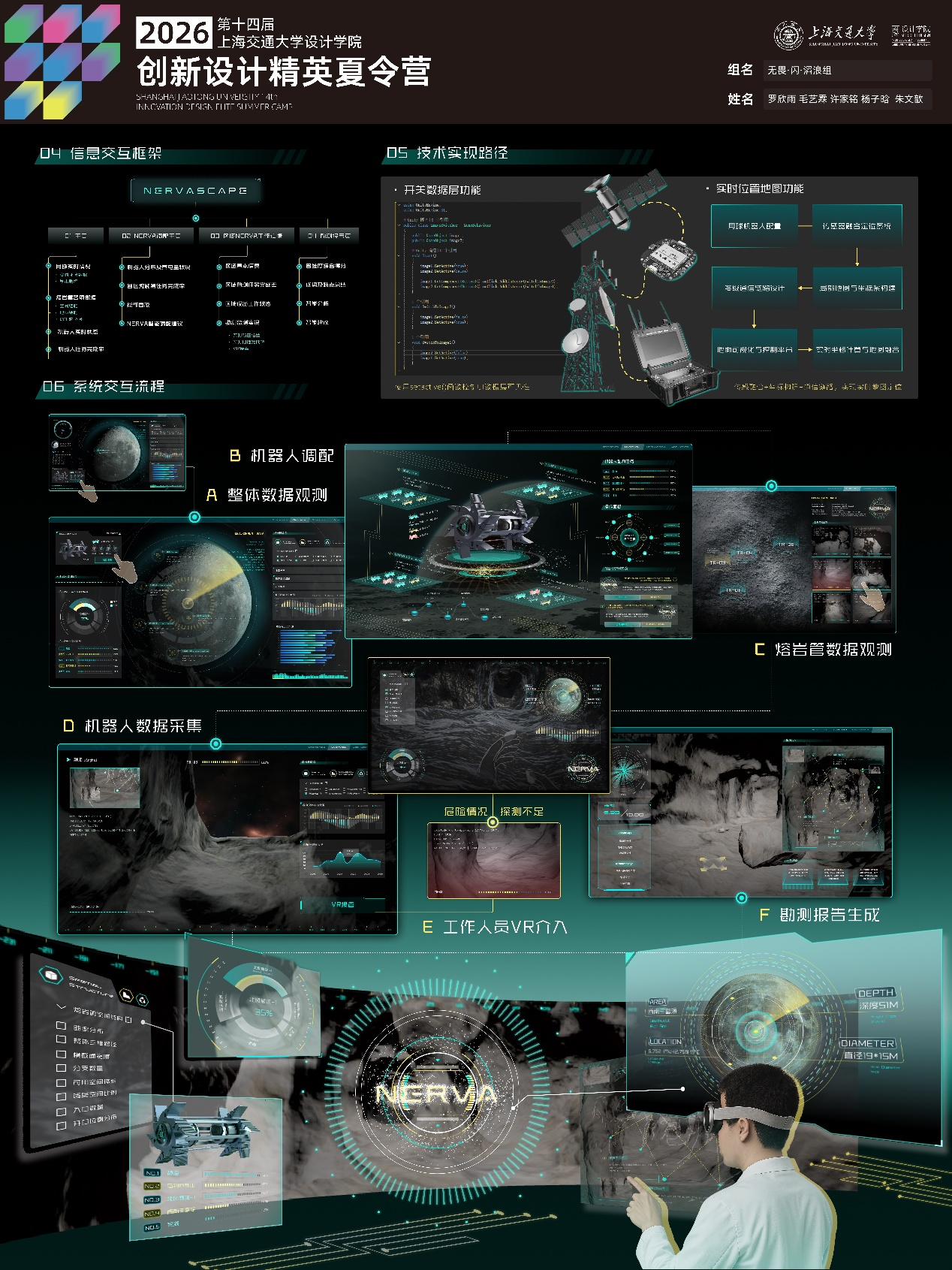
04. LUNANEST基于VR辅助的熔岩管智能勘测系统设计
朱文歆 毛艺霖 杨子晗 许家铭 罗欣雨
设计方案|通过融合VR沉浸交互与AI自主决策,驱动仿生机器人突破极端地形瓶颈,构建一套高度自主的勘测机器人系统。实时构建高精度三维地质模型,支持科研人员远程操控与基地选址评估,加速月球可持续栖居进程。
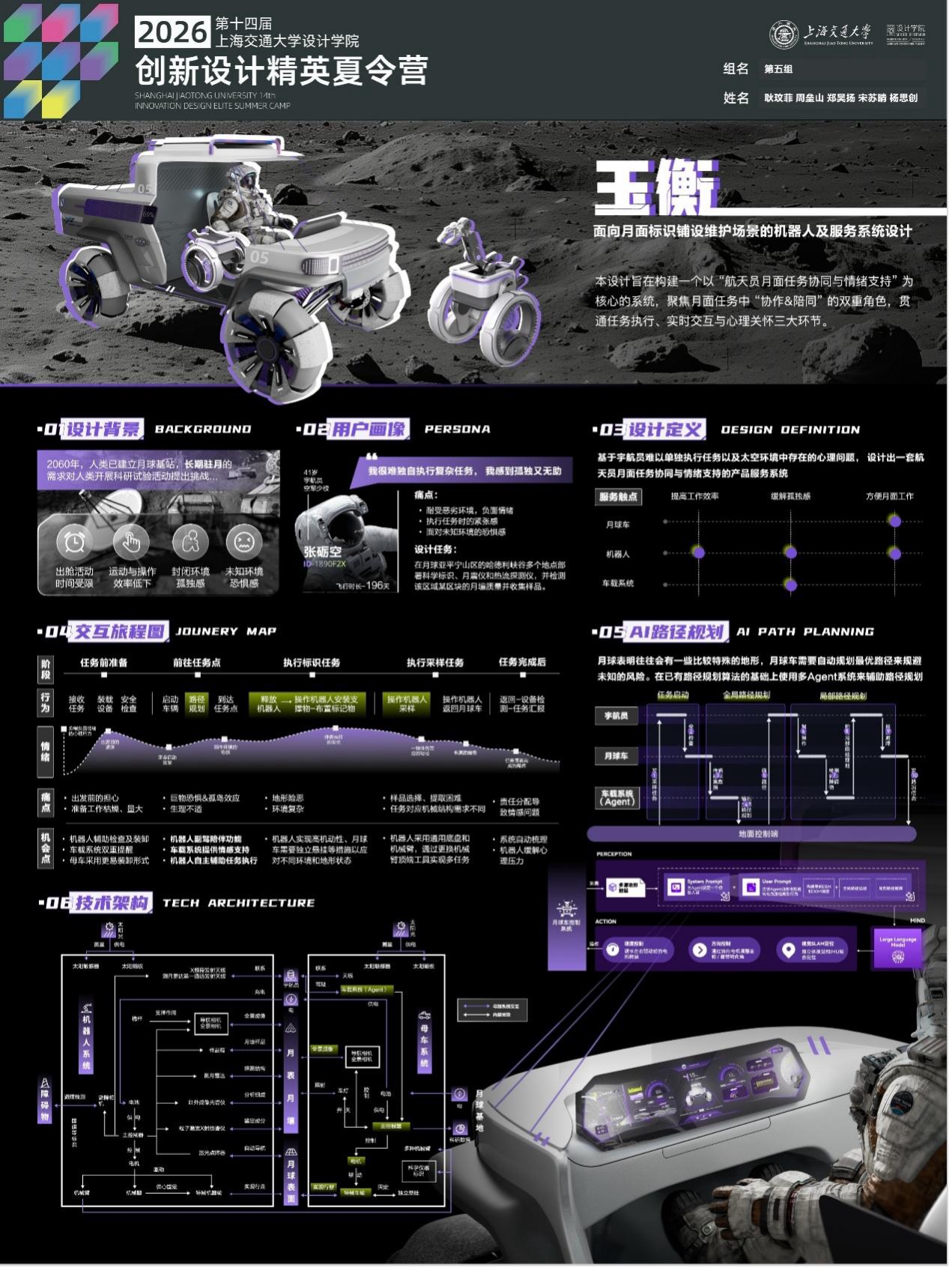
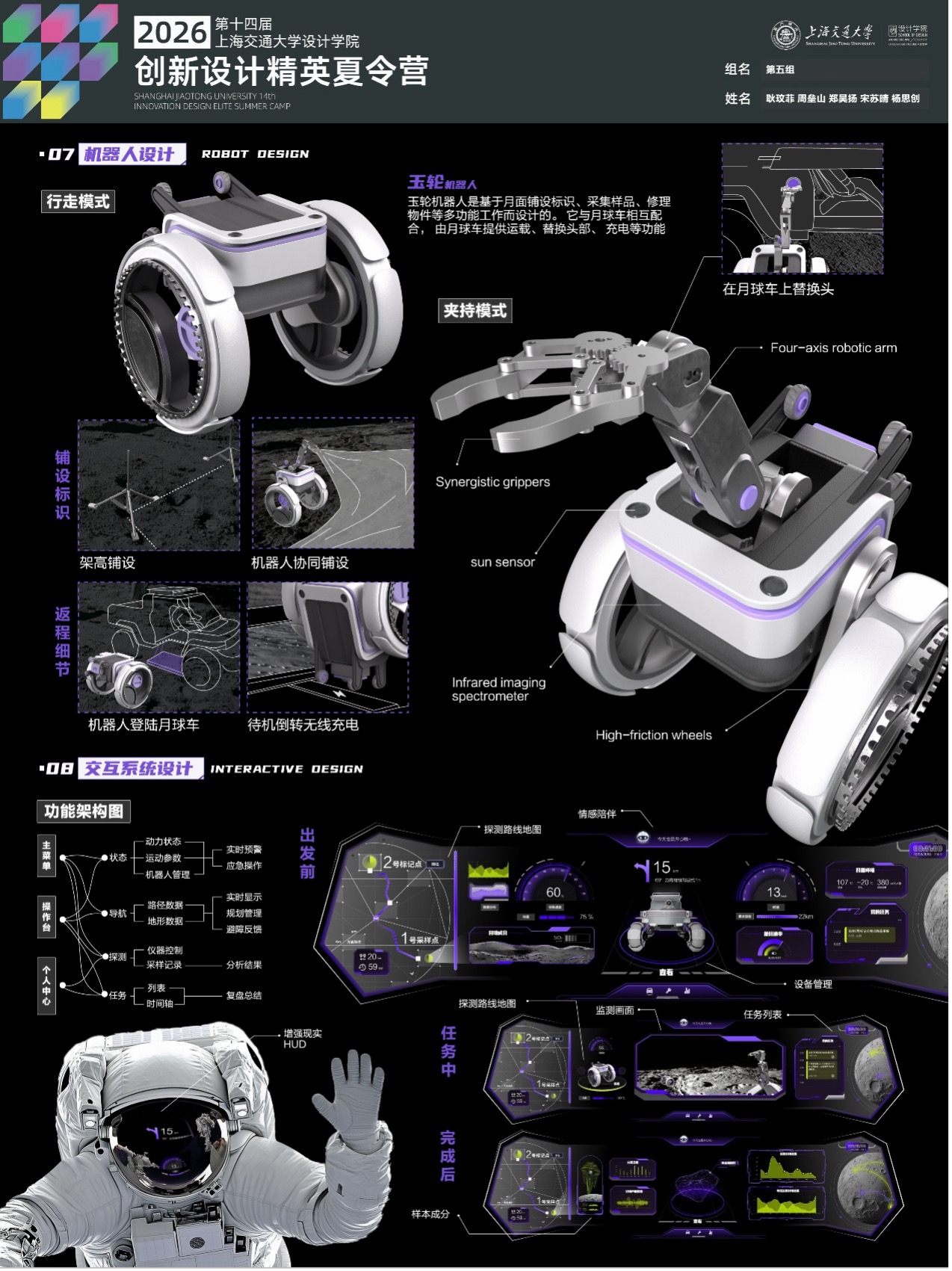
05. 玉衡-面向月面标识铺设维护场景的机器人及服务系统设计
耿玟菲 周垒山 郑昊扬 杨思创 宋苏晴
设计方案|旨在构建一个以“航天员月面任务协同与情绪支持”为核心的系统,张無月面任务中“协作&陪同” 的双亚角色,贯通任务执行、实时交互与心理关怀三大环节。
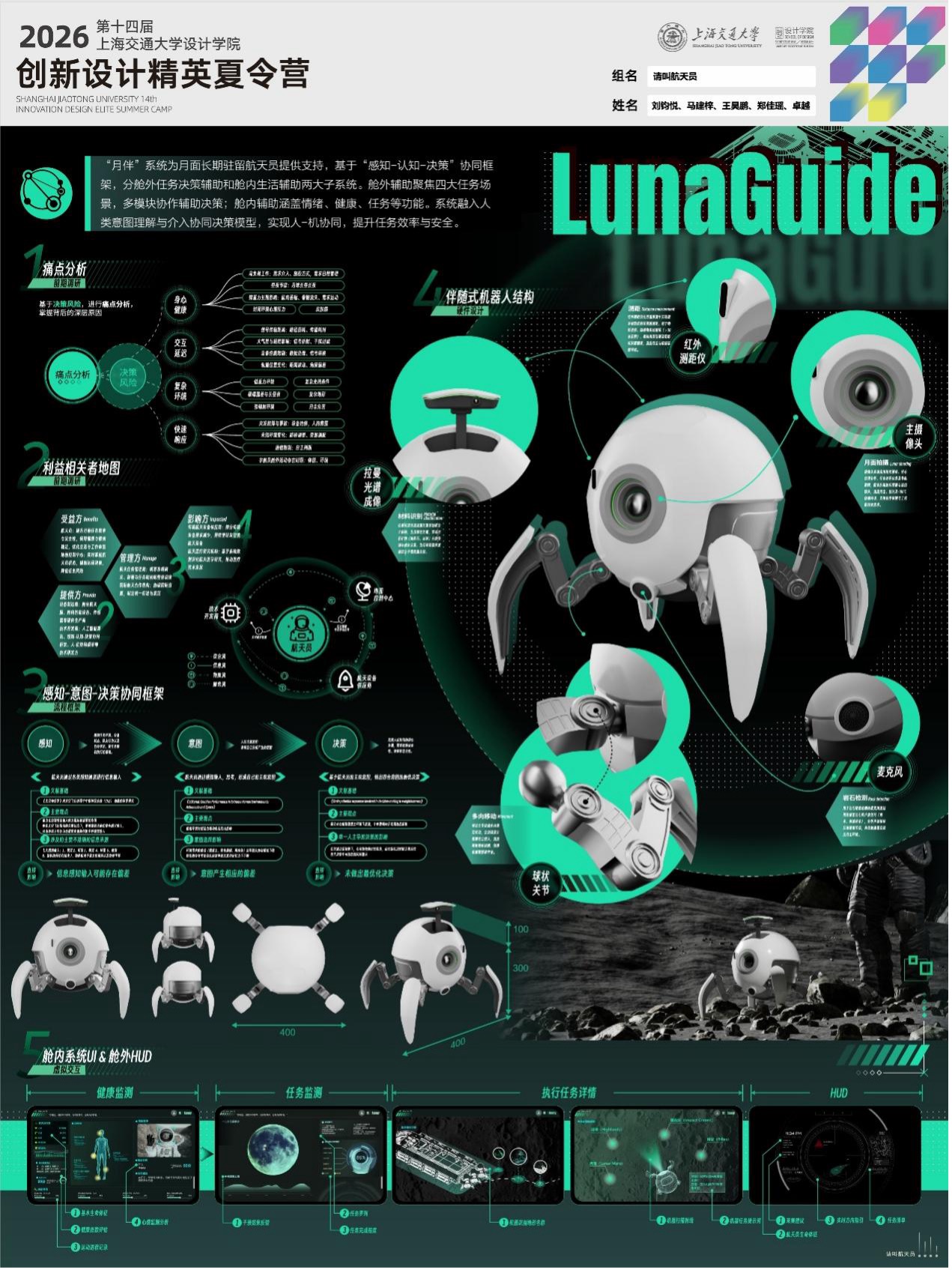
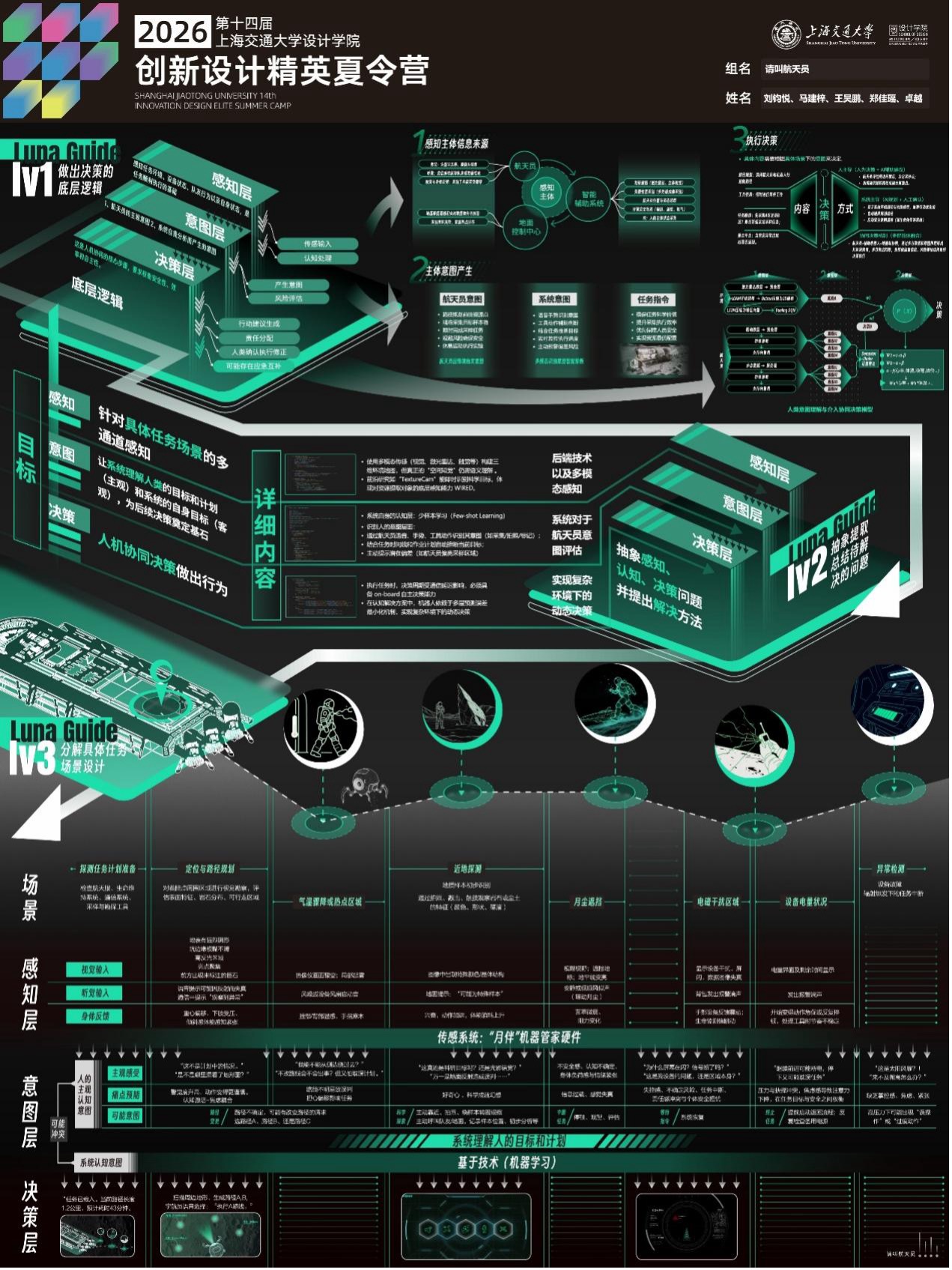
06. 月伴LunaGuide—— 基于决策协同框架的感知与伴随式支持系统设计
卓越 刘钧悦 马建梓 郑佳瑶 王昊鹏
设计方案|“月伴” 系统为月面长期驻留航天员提供支持,基于 “感知 - 认知 - 决策” 框架,分舱外任务决策辅助与舱内生活辅助子系统。舱外聚焦四大场景,多模块协作;舱内涵盖情绪、健康等功能。融入人类意图理解等模型,实现人机协同,提升效率与安全。
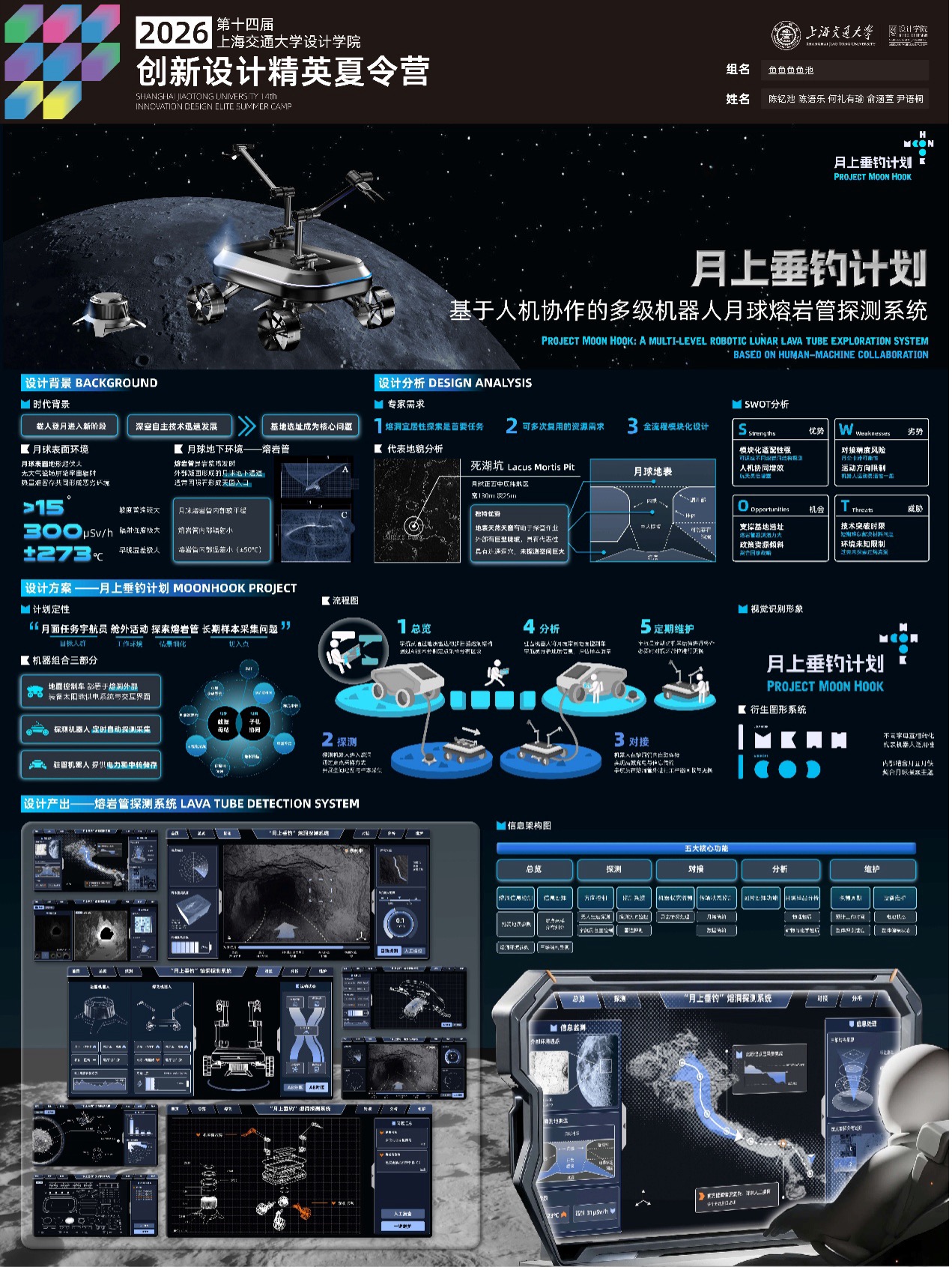
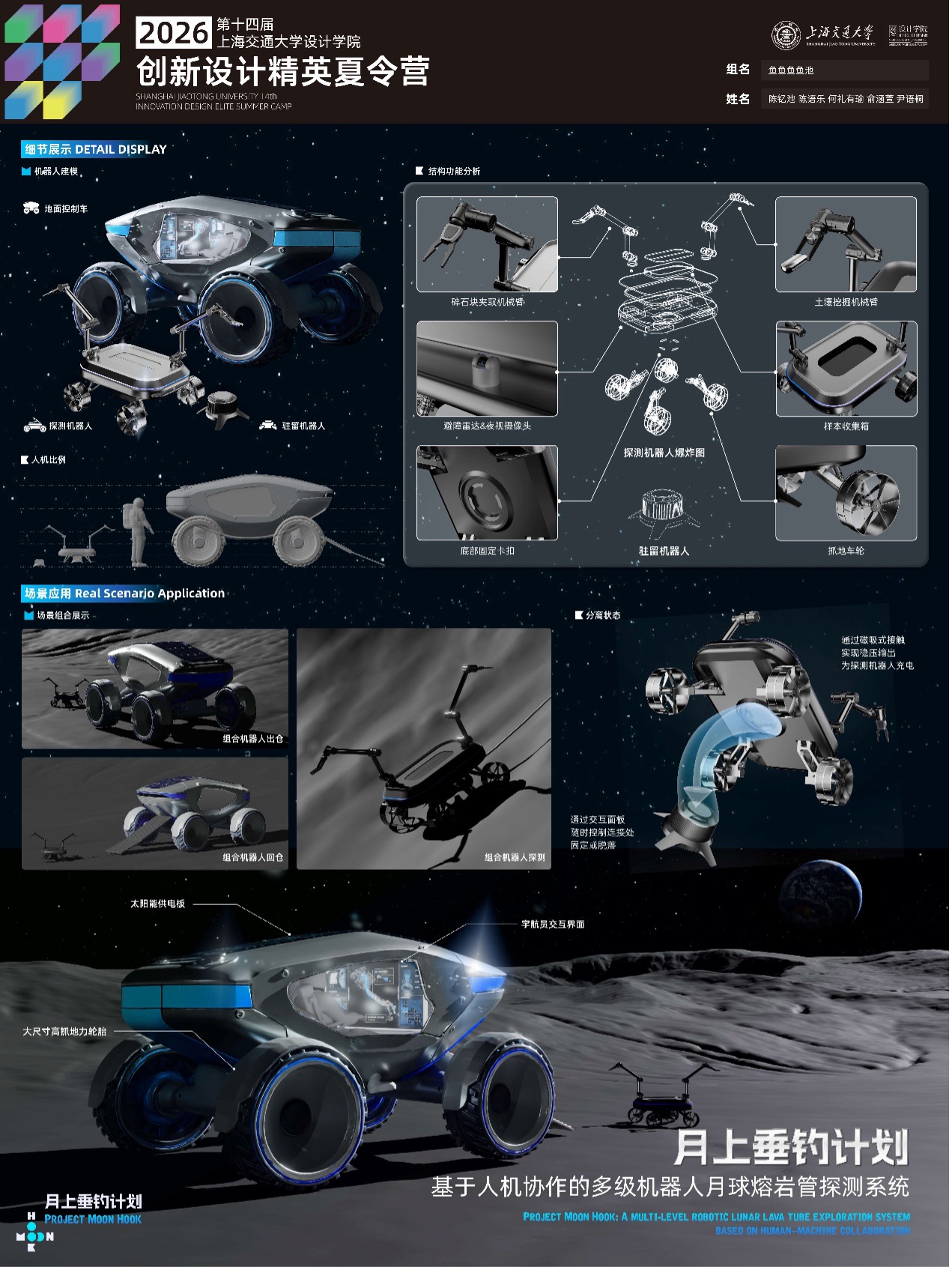
07. 月上垂钓计划——基于人机协作的多级机器人月球熔岩管探测系统
俞涵萱 何礼有瑜 陈钇池 尹语桐 陈语乐
设计方案|“月上垂钓计划”是一个为可持续探索月球地下熔岩管而构建的基于人机协作的多级机器人探测系统。机器部分由外部远程操控的地面控制车,进洞采样的探测机器人和负责补给传输的驻留机器人组成。交互系统分总览、探测、对接、分析、维护五大板块,将全流程可视化呈现,助力月球基地选址和资源勘查。
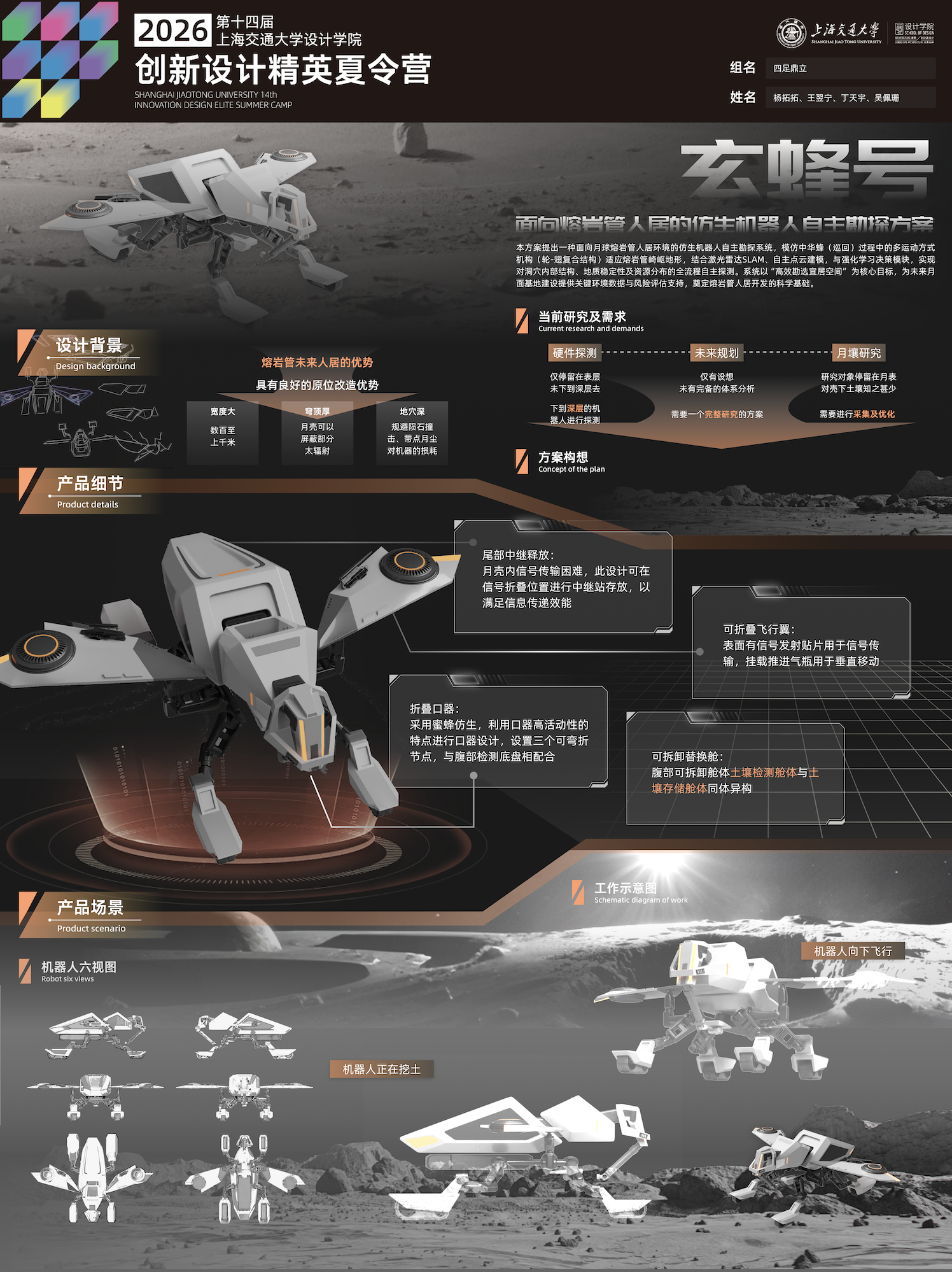
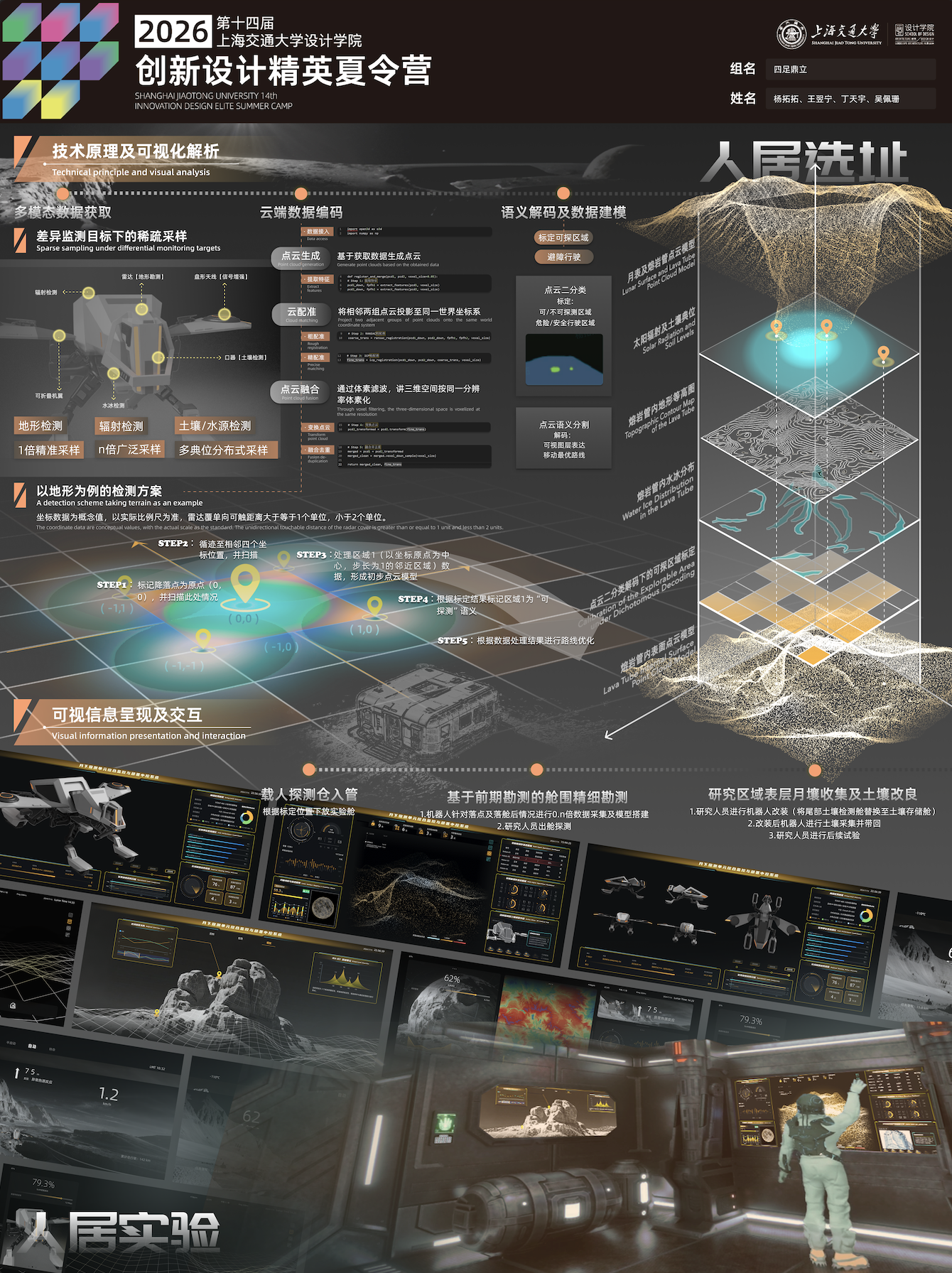
08. 玄蜂号——面向熔岩管人居的仿生机器人自主勘探方案
丁天宇 吴佩珊 王翌宁 杨拓拓
设计方案|提出一种面向月球熔岩管人居环境的仿生机器人自主勘探系统,模仿中华蜂(巡回)过程中的多运动方式机构(轮-翅复合结构)适应熔岩管崎岖地形,结合激光雷达SLAM、自主点云建模,与强化学习决策模块,实现对洞穴内部结构、地质稳定性及资源分布的全流程自主探测。系统以“高效勘选宜居空间” 为核心目标,为未来月面基地建设提供关键环境数据与风险评估支持,奠定熔岩管人居开发的科学基础。
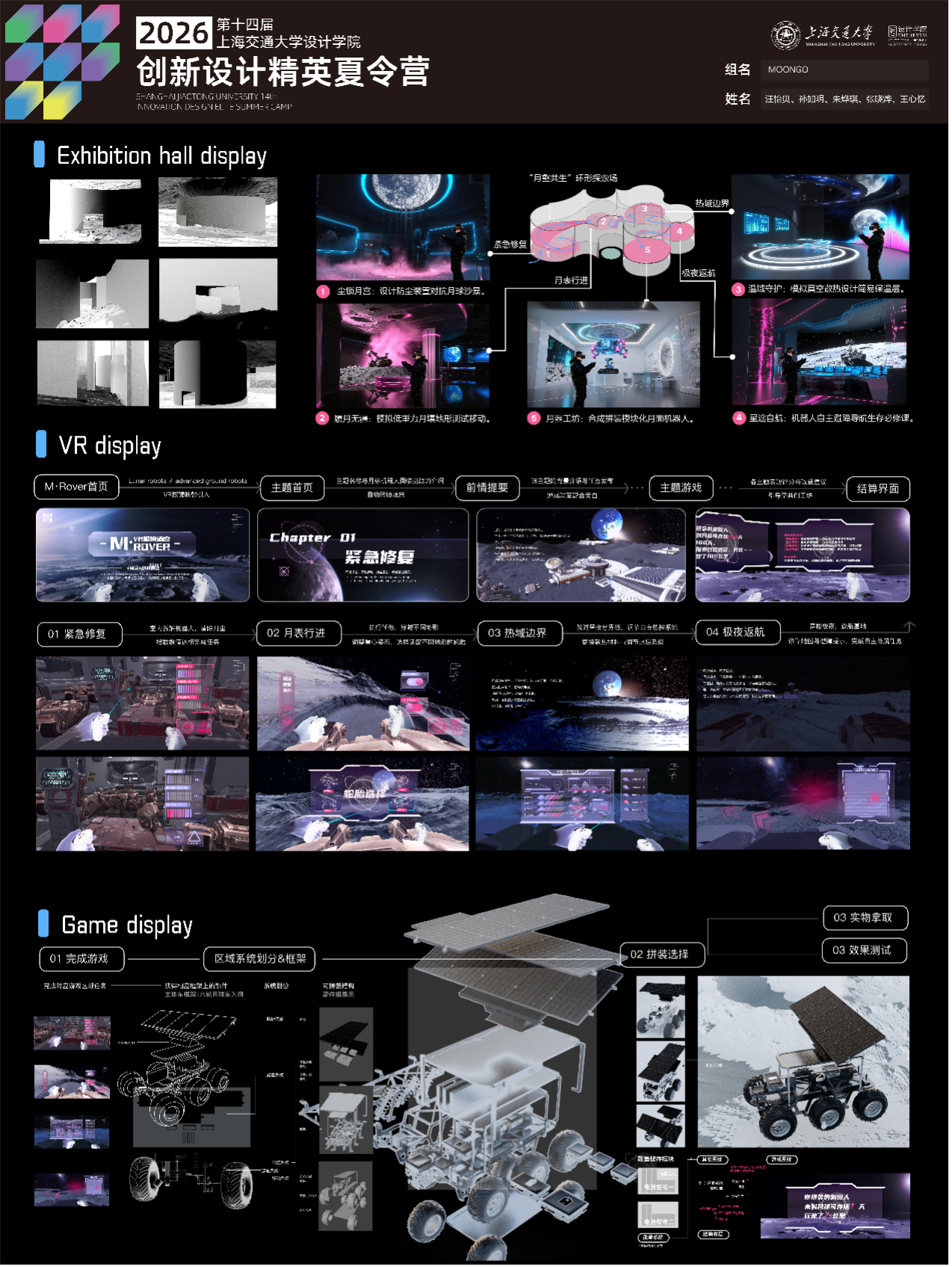
09. 共闯月境,月面机器人适应性体验计划
汪怡贝 张晓烨 朱烨琪 王心忆 孙如玥
设计方案|此设计是一项面向公众的科普传播设计,旨在打破“月面机器人=高级地面机器人”的固有认知。项目通过展馆实景导览、VR沉浸任务与模块拼装操作的三位一体交互体系,带领用户深入理解月面环境下机器人的独特挑战与任务机制。结合用户与机器人调研成果,我们构建出一条以“环境感知—任务执行—科学认知”为核心的传播路径,通过叙事引导、动手实践与虚实结合的设计方式,将月面机器人的极端环境适应性与其在星际探索中的科学价值具象化、体验化,助力公众建立更全面、深度的未来宇航认知图景。

10. 基于舱内外任务协同与地面 交互反馈需求的系统设计
热娜·牙力坤 张歆梓 黄煜博 孙点点 逯一凡
设计方案|为应对舱内外人-机-环复杂系统协作的挑战,并解决民众对宇宙探索强烈好奇却难以亲身体验的痛点,我们设计了一套基于舱内外任务协同与地面交互反馈需求的系统。通过“婵娟”——一款舱内外双模态月面作业机器人。可在舱内与舱外两种作业模式间灵活切换,舱内陪伴、传递 、协作,舱外伴行、探测、携物,结合航天服中的头戴显示器为航天员提供任务辅助,并且同步传信息至地面展厅,借沉浸模拟、实时互动,让公众实感实受,拉近地月距离,兼顾商业文创支撑,形成“商业-技术-情感”三角闭环,传递“千里共婵娟”的地月深情。


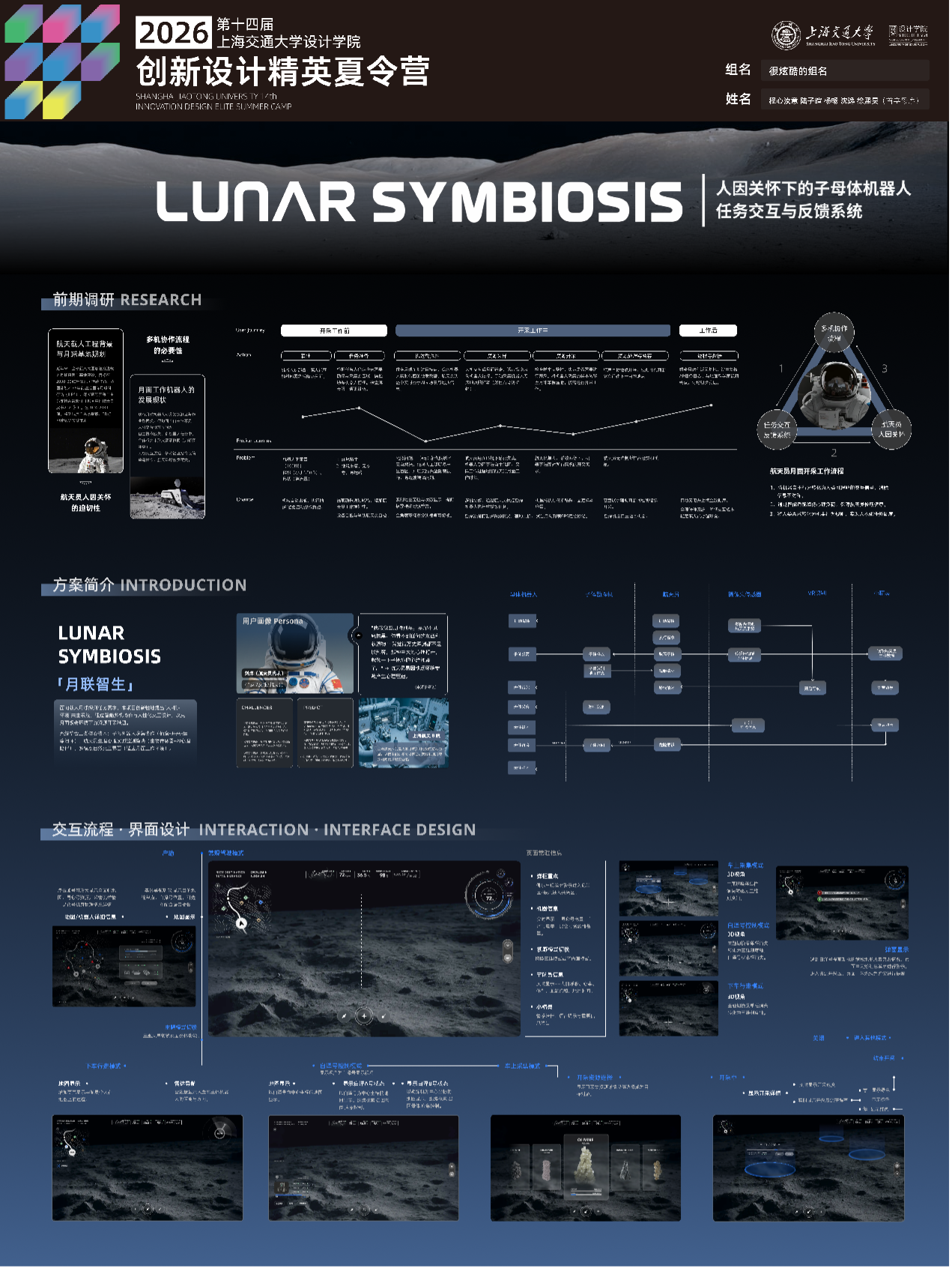
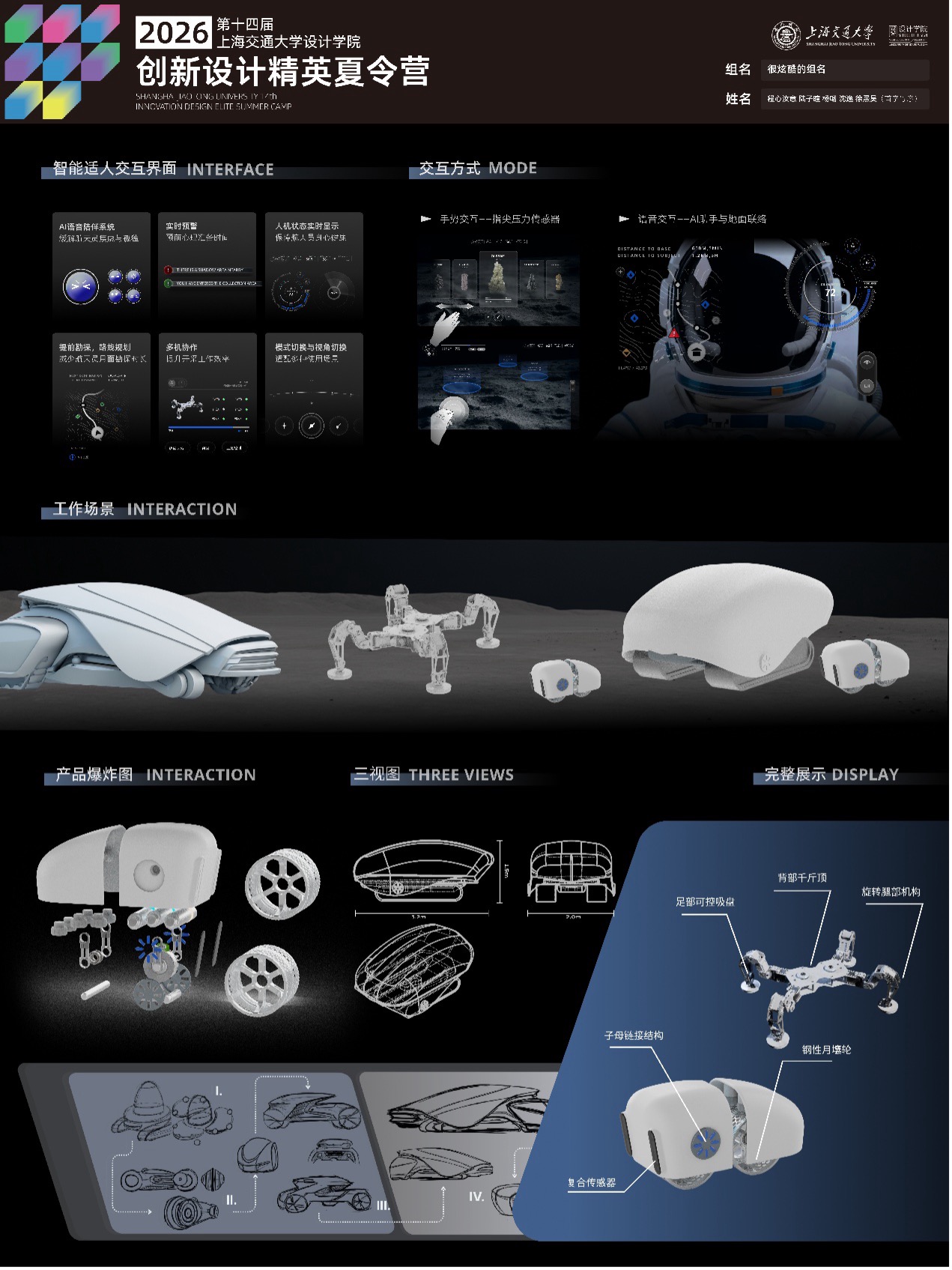
11. LUNAR SYMBIOSIS:人因关怀下的子母体机器人任务交互与反馈系统
陆子暄 杨畅 徐熙昊 程心汝意 沈逸
设计方案|本项目以“人-机-环境共生”为理念构建月球多机协作系统。交互设计通过多模态界面与视觉增强系统,实现低负担、高可靠性的操作体验,辅助航天员高效作业。工业设计上,子母机器人具备模块化结构与越障能力,适应多变复杂地形。
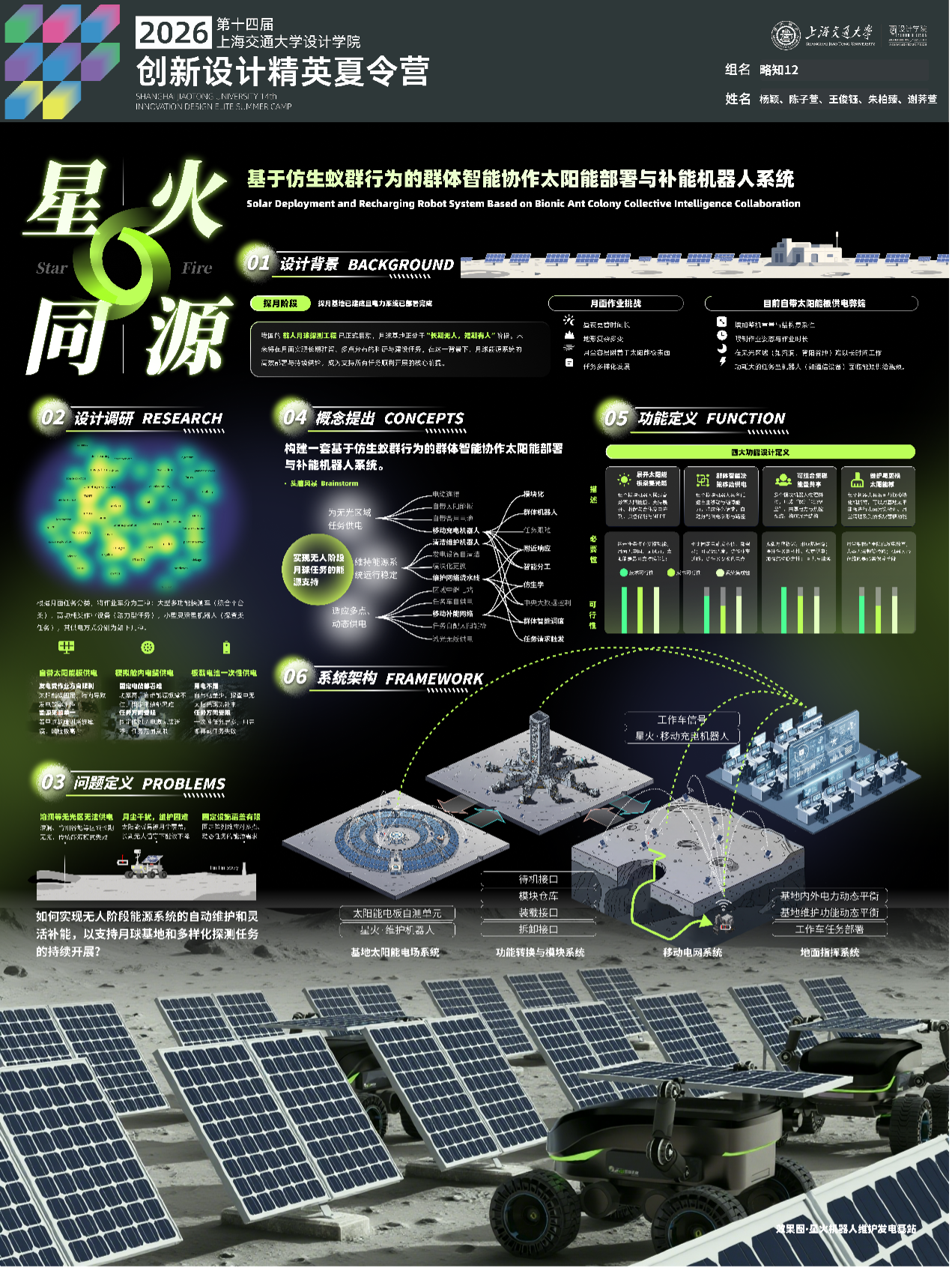
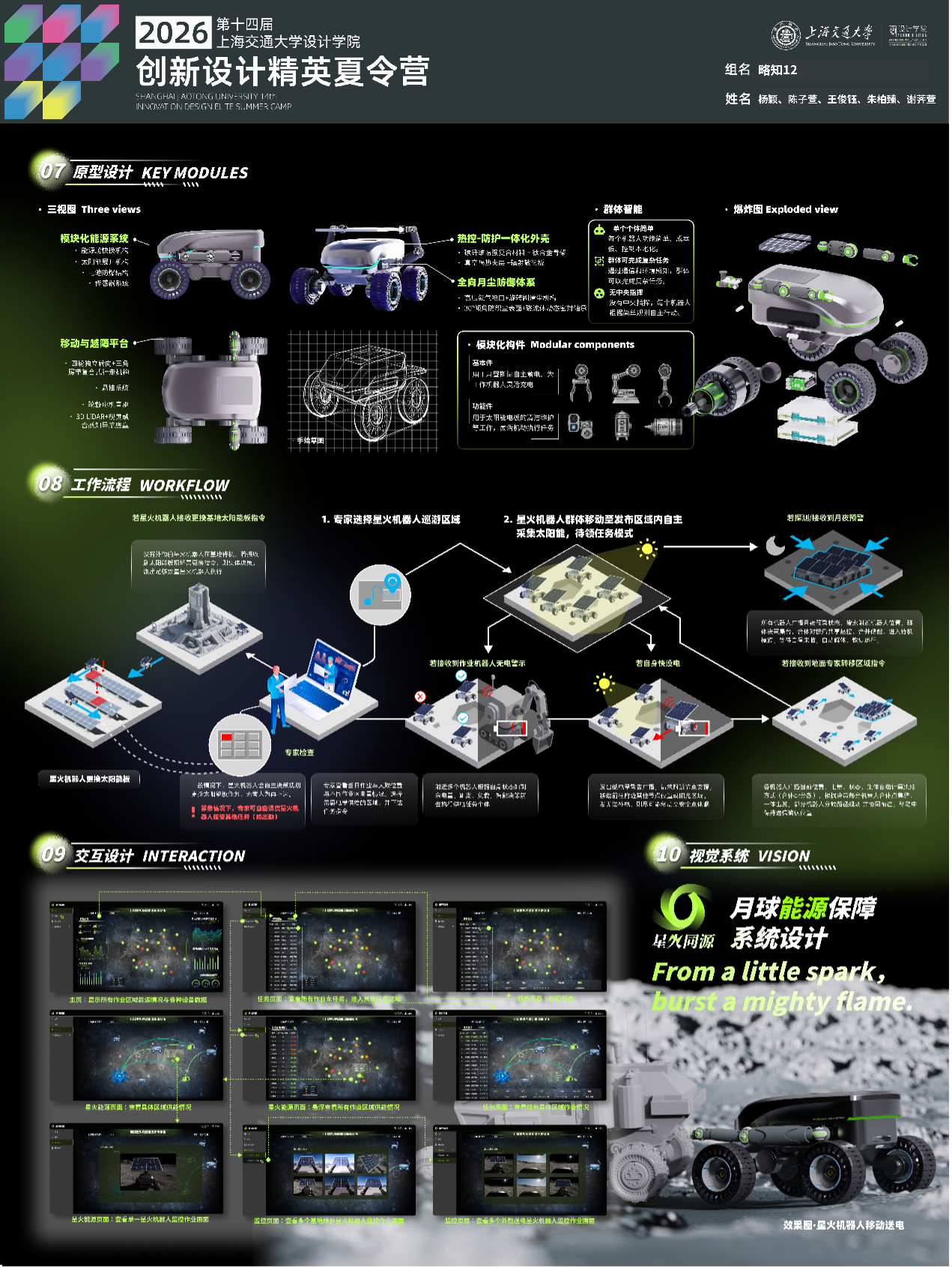
12. “星火同源”—基于群体智能的月球能源保障机器人系统
杨颖 朱柏臻 谢荠萱 王俊钰 陈子萱
设计方案|“星火同源计划”是一套面向月球能源保障的蚁群仿生群体智能机器人系统,致力于实现月球基地无人阶段高效、灵活、自主的太阳能部署与补能。通过模块化群体智能机器人“星火”的协同作业,在月球部署移动电力网络,并完成中心电场的维护工作,实现面向未来无人环境的能源自组织与智能调度。
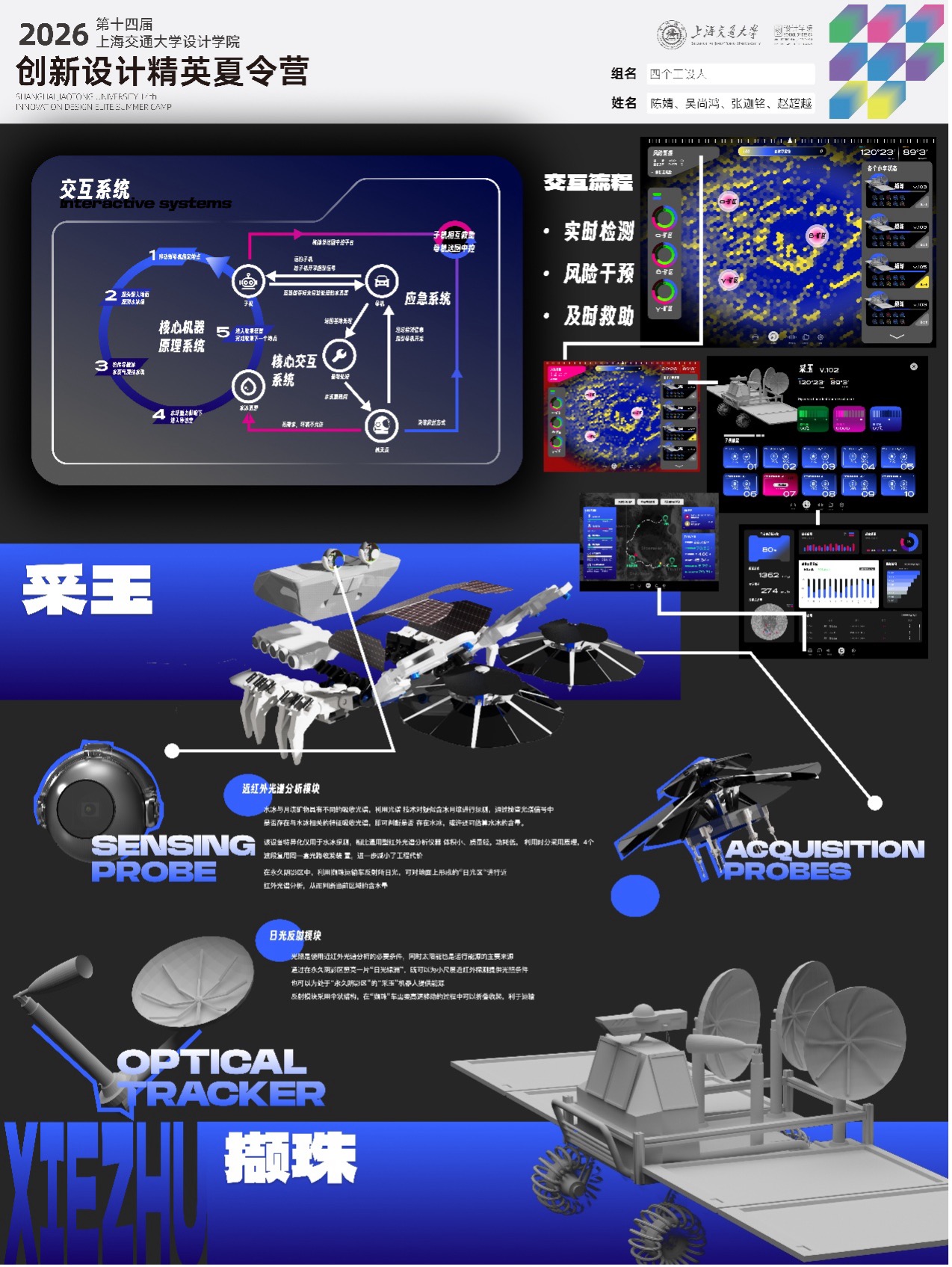
13. 撷珠采玉-针对月球水冰资源的机器人及交互系统设计
张珈铭 吴尚鸿 赵超越 陈婧
设计方案|针对月球南极永暗区水冰资源开采,设计子母机协同开采方案,搭配交互系统精准辅助作业,融入战略资源争夺考量,助力月球资源开发。

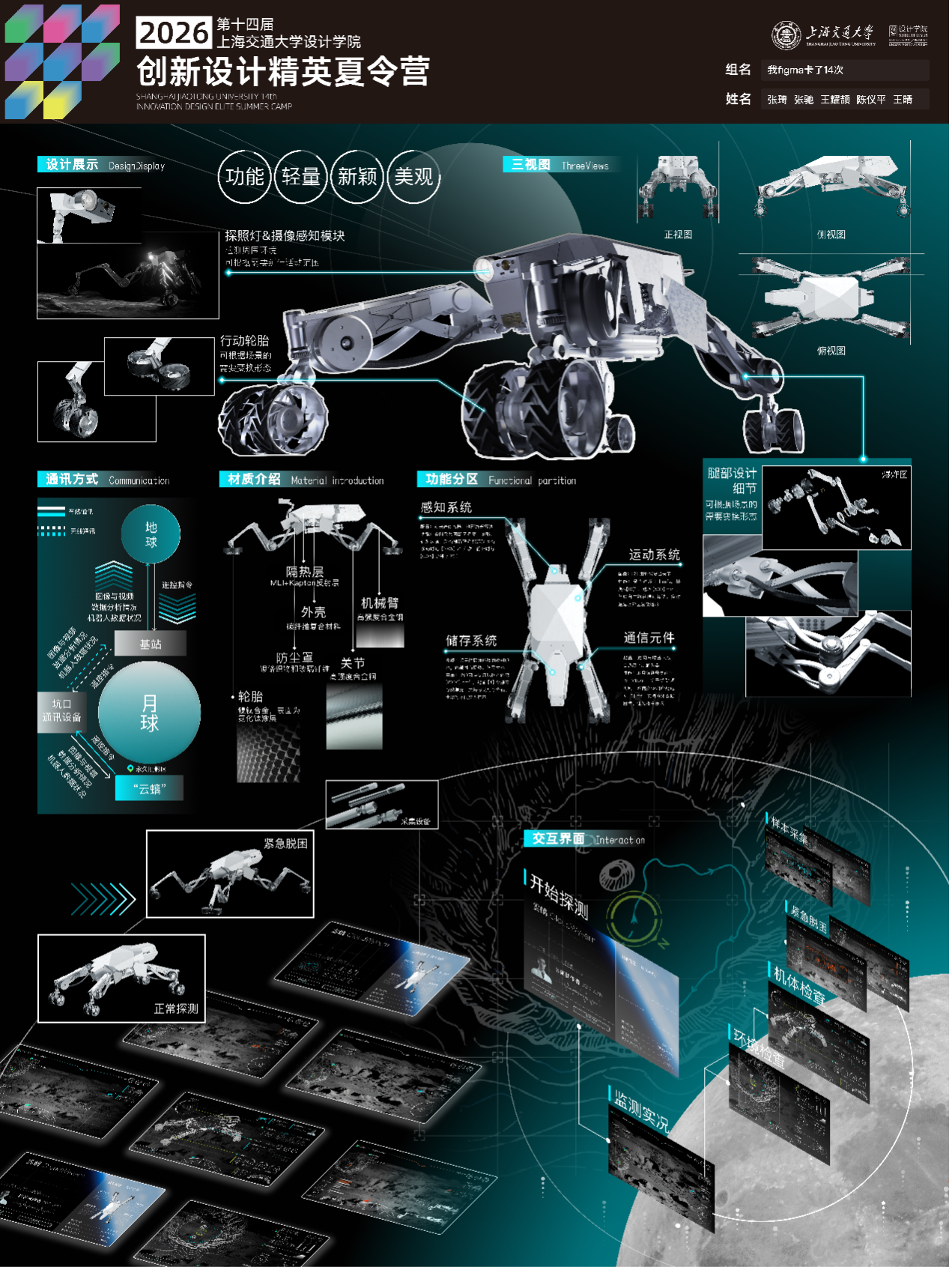
14. 雲螭 —— 适应月球永久阴影区的智能探测机器人设计
陈仪平 王晴 张琦 王耀颉 张驰
设计方案|雲螭旨在应对月球永久阴影区极寒、永夜、月尘磨蚀及通信阻断等多重极端挑战,同时通过其内置的智能感知与自主决策能力,从根本上重构并优化人类在长时延、信息不完整环境下的远程操作流程。其最终目的,是在保障人机协同高效、可靠的前提下,完成对永久阴影区高价值样本的采集与原位科学探测。